
资料下载


玛丽亚机器人开源硬件
分享资料个
描述
概述
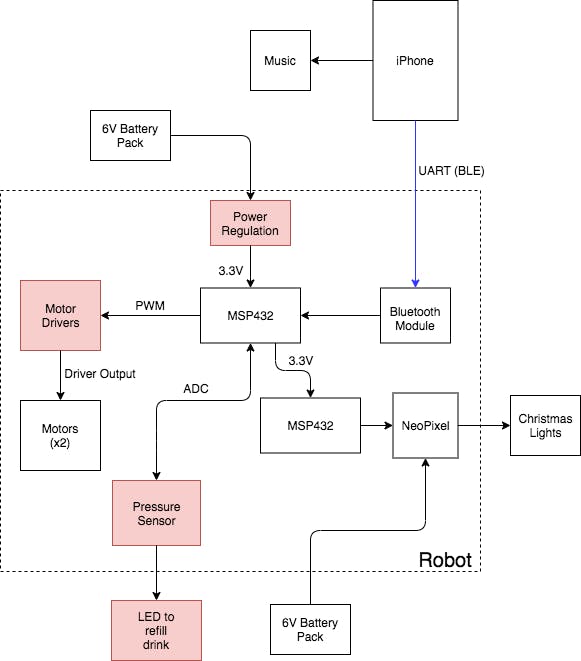
我们的项目希望在圣诞节期间将玛丽亚凯莉带回美国的每个家庭。毕竟,没有 Mariah 的圣诞节会怎样……我们的项目将利用 Mariah 最热门的歌曲之一“我想要的圣诞节就是你”,为任何可怕的办公室聚会或可怕的家庭聚会带来节日欢乐。用户将能够远程控制我们的机器人,在 Mariah 高唱她的传奇音符时,为参加派对的人提供节日饮品和点心。一旦机器人的茶点用完,机器人上的警告灯就会亮起,指示用户需要补充节日茶点。为了增加项目的节日气氛,将安排 LED 灯,随着歌曲的节拍闪烁红色和绿色
框图
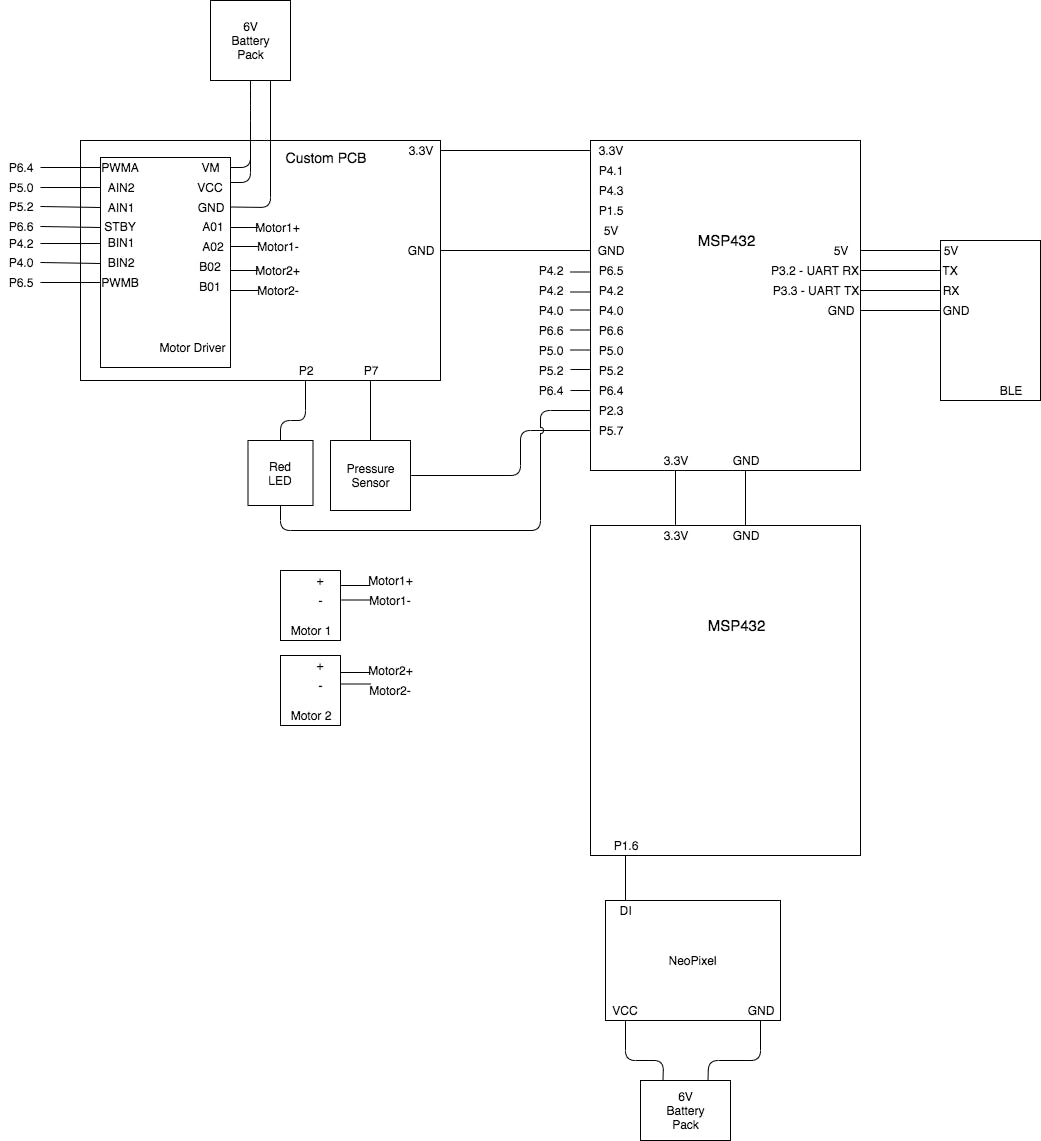
接线图
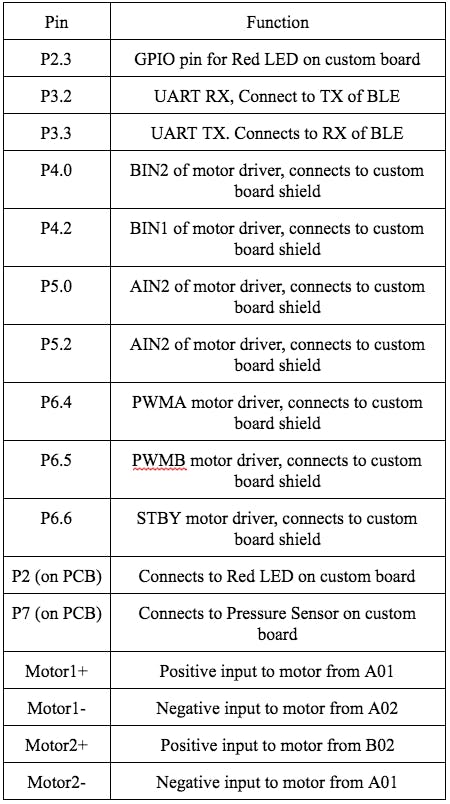
引脚图
MSP #1 的引脚映射
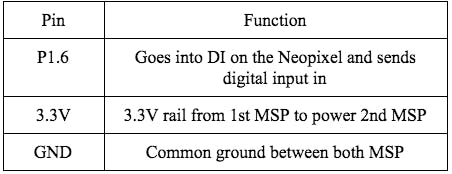
MSP #2 的引脚映射
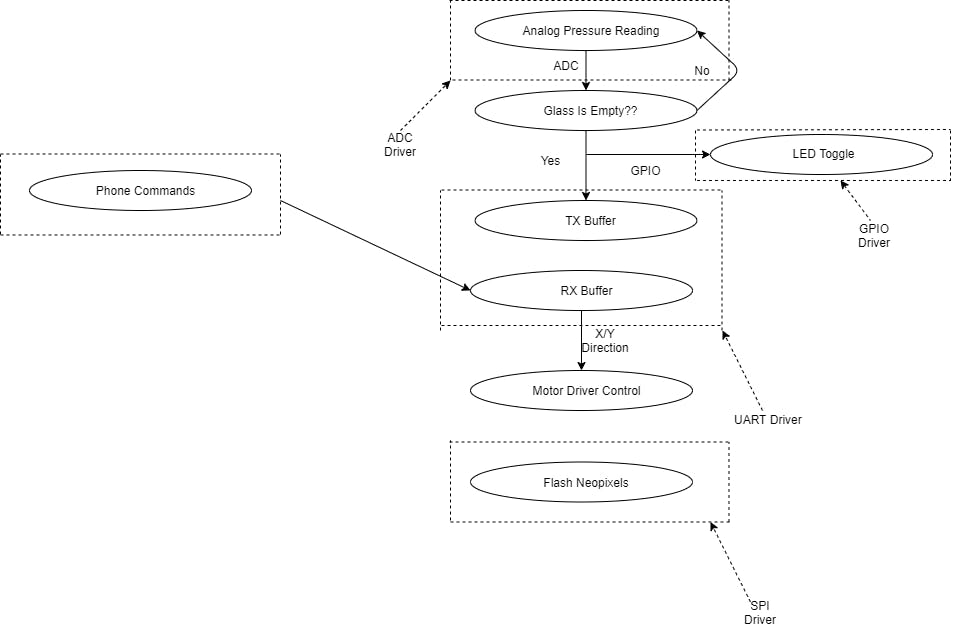
软件示意图:
硬件
HM-10蓝牙模块
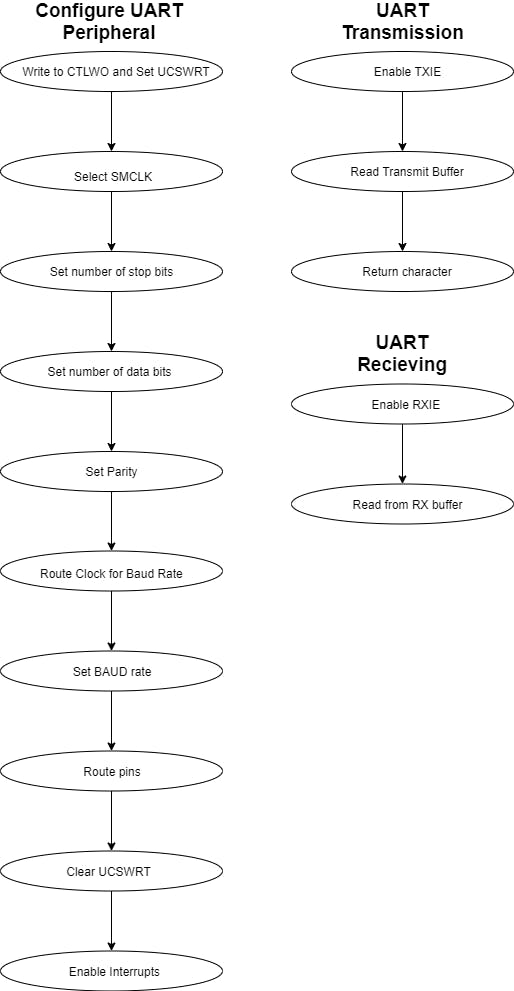
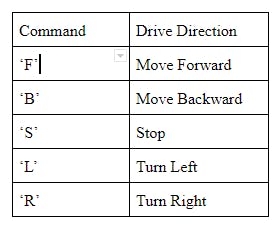
DSD HM-10 蓝牙模块使用 UART 通信从手机或其他 HM-10 模块传输和接收数据。在这个项目中,HM-10 从带有 DSD 蓝牙应用程序的 iPhone 接收命令,使机器人向前、向后、向左、向右移动和停止。用户中继单个字符命令以指定移动方向。命令指定如下:

NeoPixel8x8LED矩阵
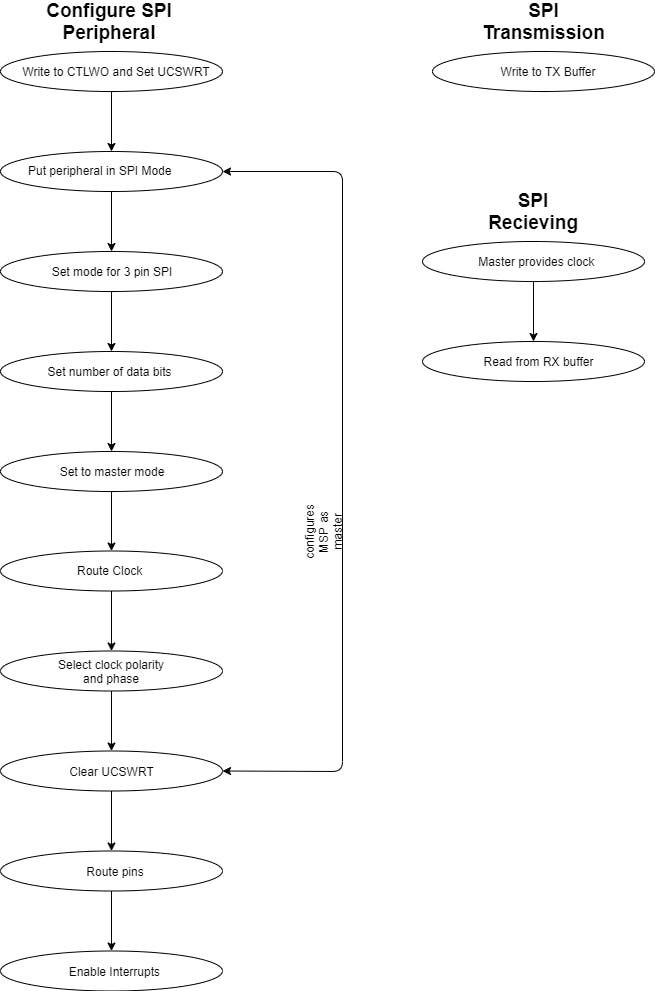
Adafruit 的 Neopixel 系列使用 WS2812B 芯片(或等效芯片)作为 LED 控制器。使用的串行通信方法是 NZR(不归零),因此为了发送我们的数据,我们将使用一种称为“bit-banging”的方法。Bit-banging 不同于普通的通信方法,因为数据脉冲是通过软件而不是硬件来处理的。
定制PCB
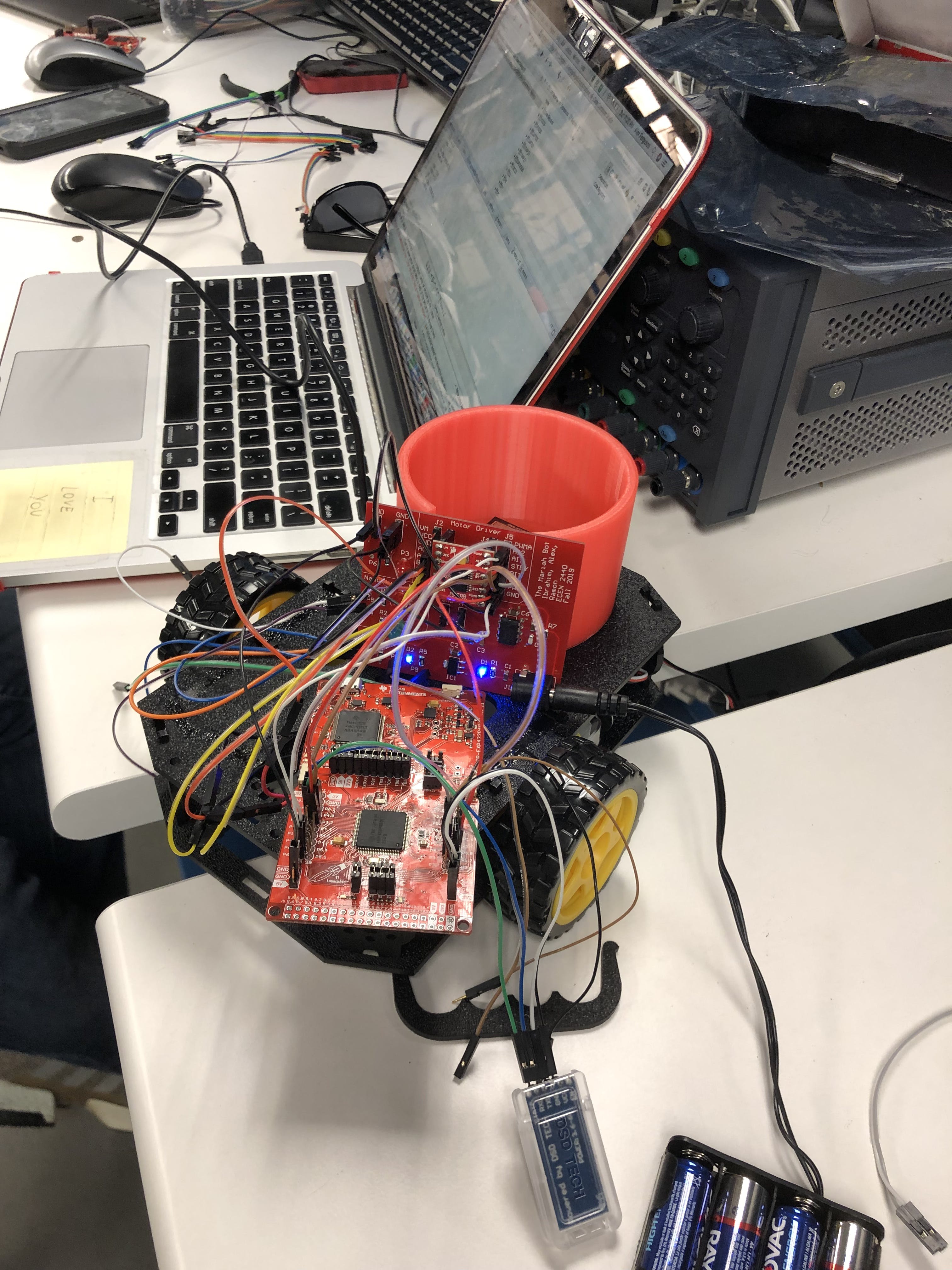
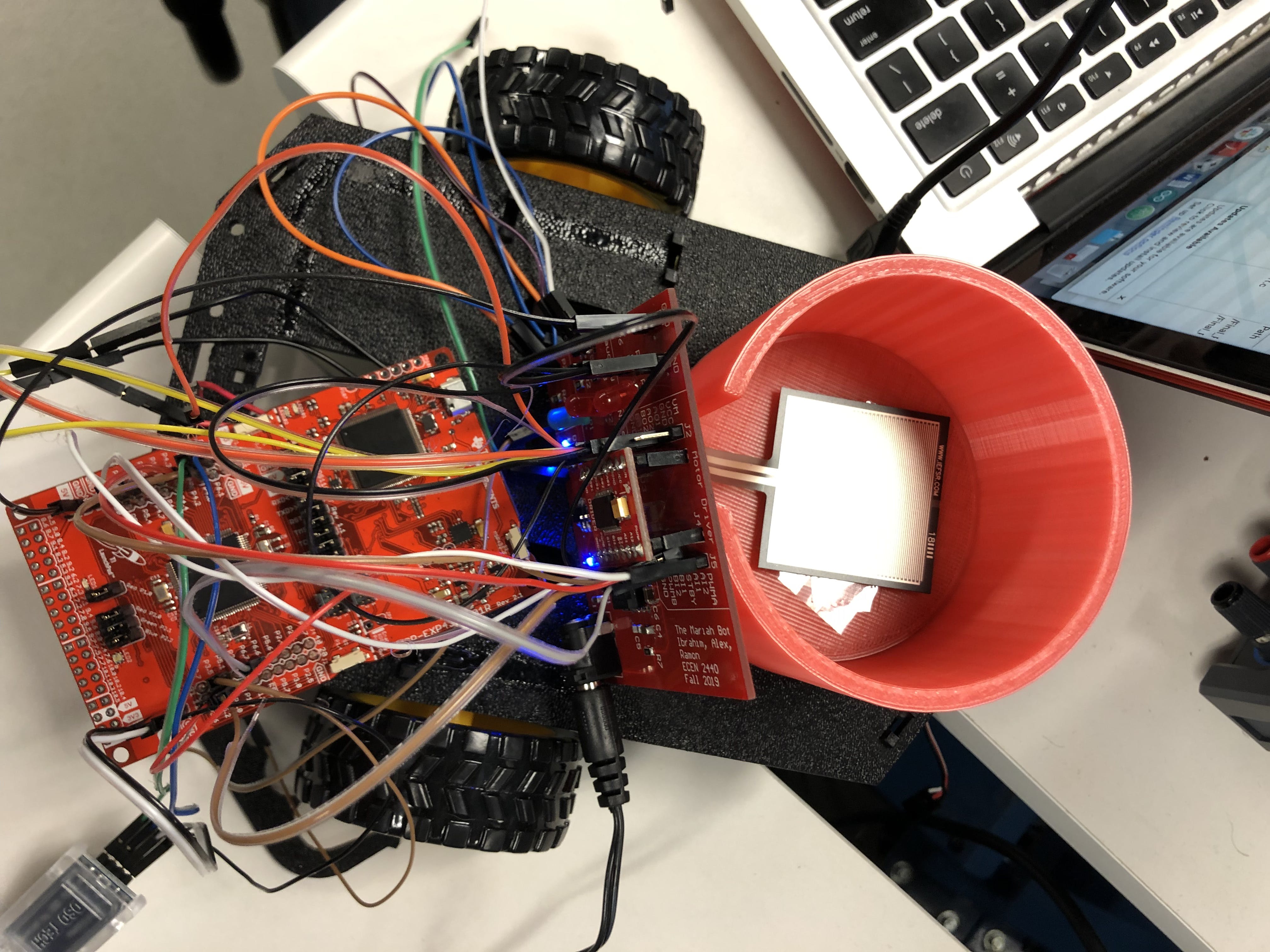
我们团队制造的定制 PCB 旨在连接项目中的所有外围设备(LED、压力传感器、MSP 和电源)。除均衡器电路外,该板已集成到项目中,最终组装的板可在附件部分看到。
MSP432
该项目使用了两种不同的 MSP432 开发板,其中一种用于从蓝牙检索数据并根据收到的命令相应地移动电机。另一个 MSP 用于控制机器人正面的 Neopixel 阵列。
电机驱动器 - TB6612FNG
该项目中使用的电机驱动器是 Sparkfun Electronics 的 TB6612FNG 分线板。我们使用此板是因为电机驱动器 IC 能够同时驱动两个直流电机。为了将此 IC 与我们的 MSP 集成,我们需要为每个电机创建 PWM 信号以及 3 个 gpio 信号以指定车轮旋转方向和启用引脚。为了控制旋转方向,MSP 上有两个 gpio 引脚在低电平和高电平之间切换,以控制电机上的电压极性。下表显示了两个引脚的不同组合。
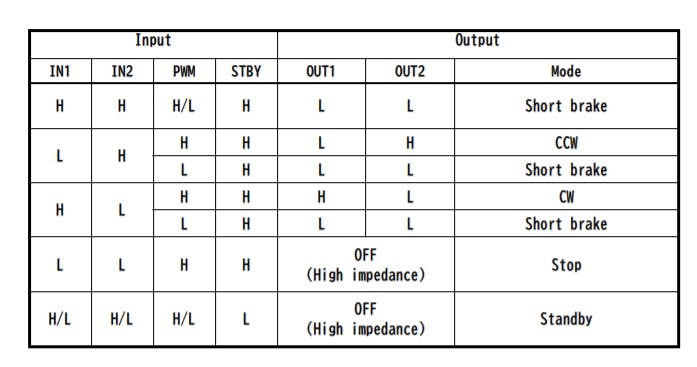
为了向前和向后移动,我们让两个轮子分别顺时针和逆时针旋转。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




