
资料下载


机器人开源硬件
刘燕
分享资料个
描述
介绍
机器人一直是我们团队感兴趣的一个巨大领域,这是我们第一次有机会使用带有独立微控制器的装置,这要归功于 Dynamixel 盾牌。
该项目虽然没有任何新的或原创的内容,但旨在为新的机器人爱好者提供使用 Bioloid 套件的用户指南,并证明即使使用基本的机器人套件也可以实现目标。
该设计可以扩展为银行或联邦办公室的职员在没有直接身体接触的情况下接收文件并保持所需距离的社交距离。
材料
我们使用 Robotis Dynamixel Shield 和库来控制来自 Dynamixel 的 AX 系列伺服器,连接到 Arduino 101 板。控制界面是使用 Adafruit Feather HUZZA32 和 Adafruit Joy Featherwing 完成的。我们总共使用了 4 个 dynamixel 舵机、三个 AX-18A 和一个 AX-12A,以及 Bioloid 框架部件来构建手臂。
其他组件显示在下面的快照中。
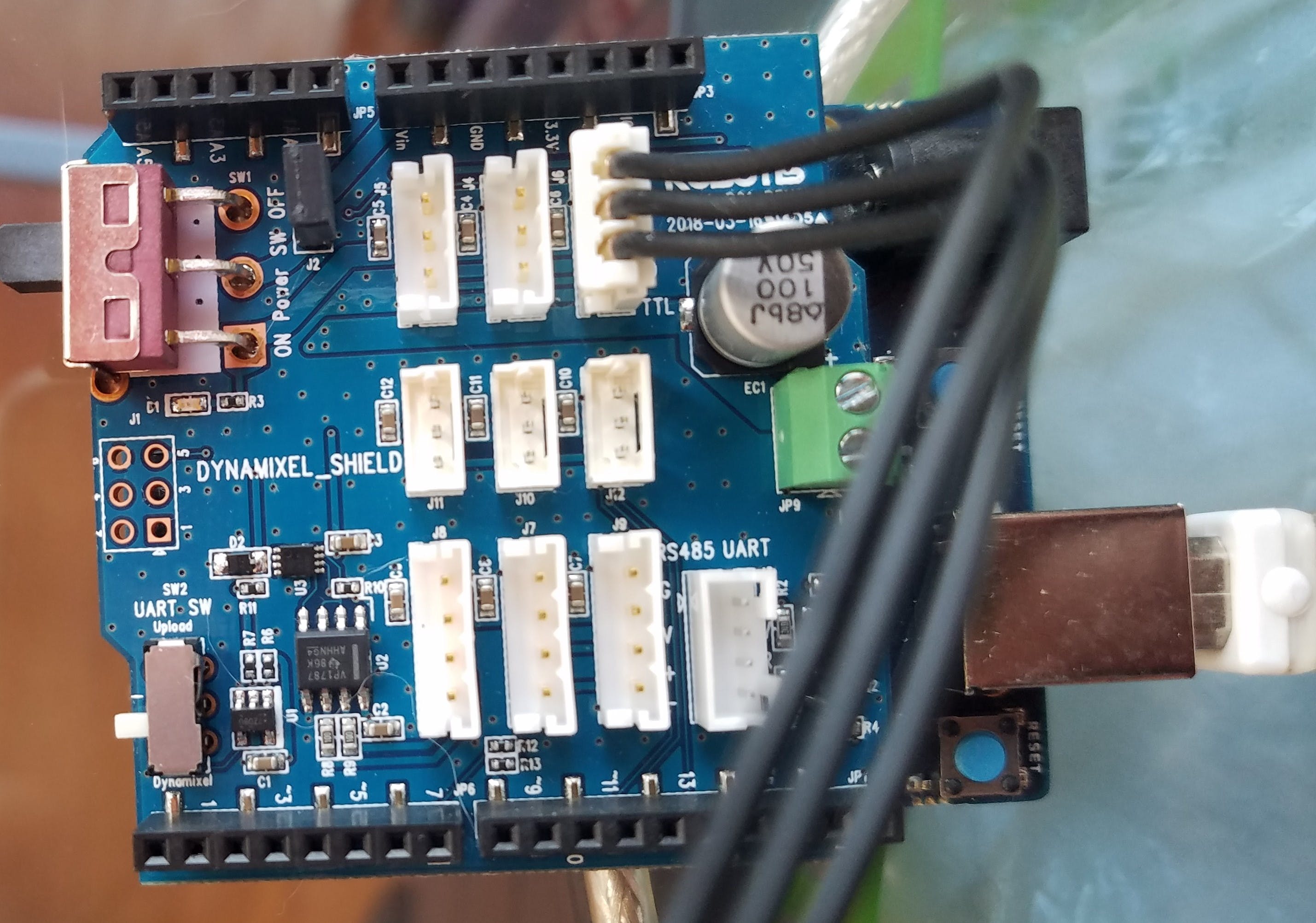
Dynamixel Shield - Robotis
我们使用 Robotis 的启动指南来安装 shield,您可以在此处访问最新的 API 库。
在客户端设备上,我们通过启动 BLE 并扫描可用的外围设备来连接服务。
机器人特
我们使用 Adafruit FeatherWing Tripler 连接 ESP32、操纵杆和显示器来控制手臂。该界面易于组装并用手抓握。
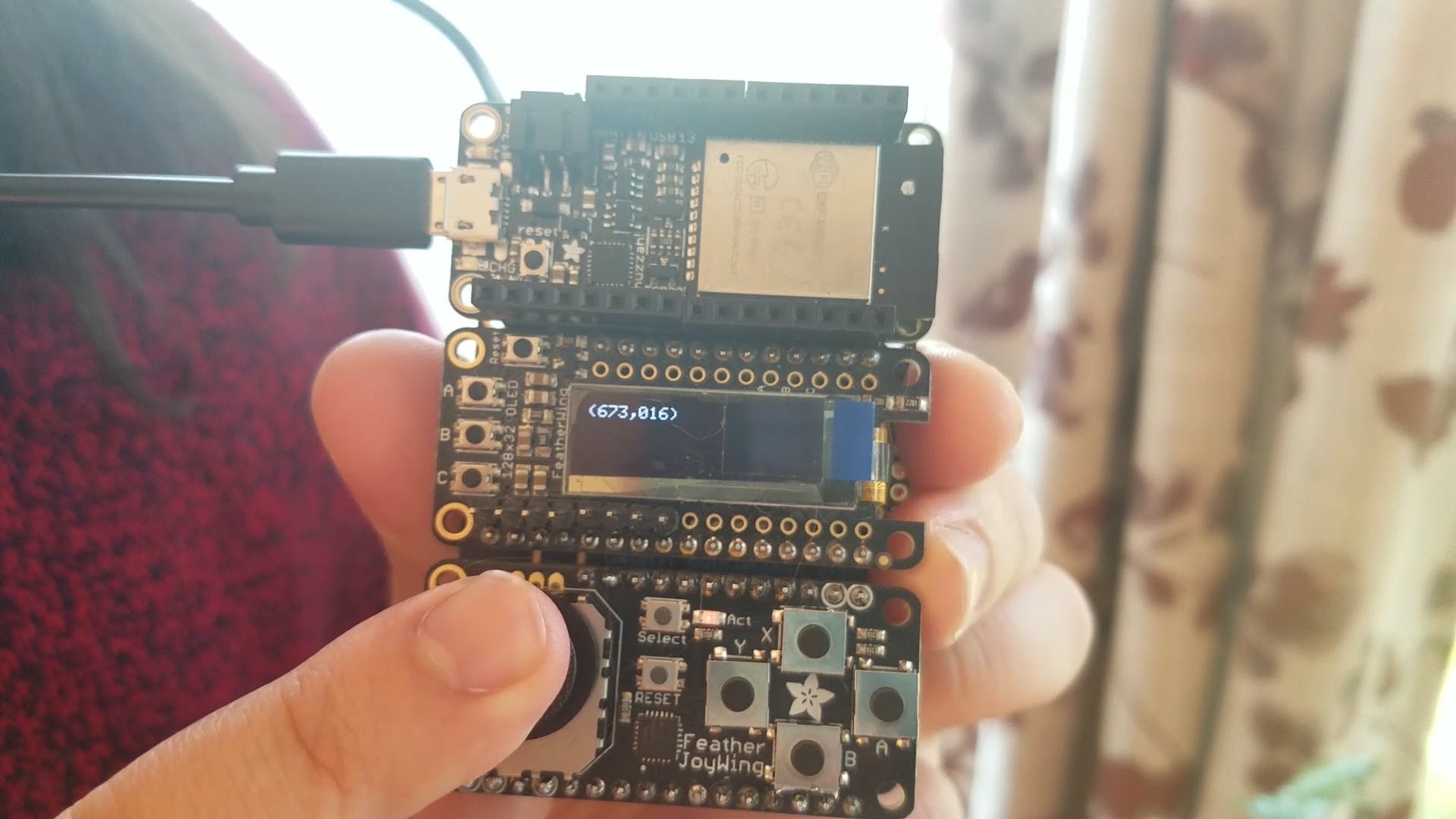
。显示了界面的演示。
手臂伺服系统使用提供 9V 电流的电源插头连接到电源集线器。arduino 和 ESP32 连接到 LIPO 电池。这些设备的功耗最低。
我们注意到,在某种程度上使用此配置会产生打嗝传输问题。
最小接口
我们最终通过将操纵杆直接连接到 ESP32 板上尝试了一个最小的界面。与连接显示器的配置相比,这种配置更小,用户功耗也更低。
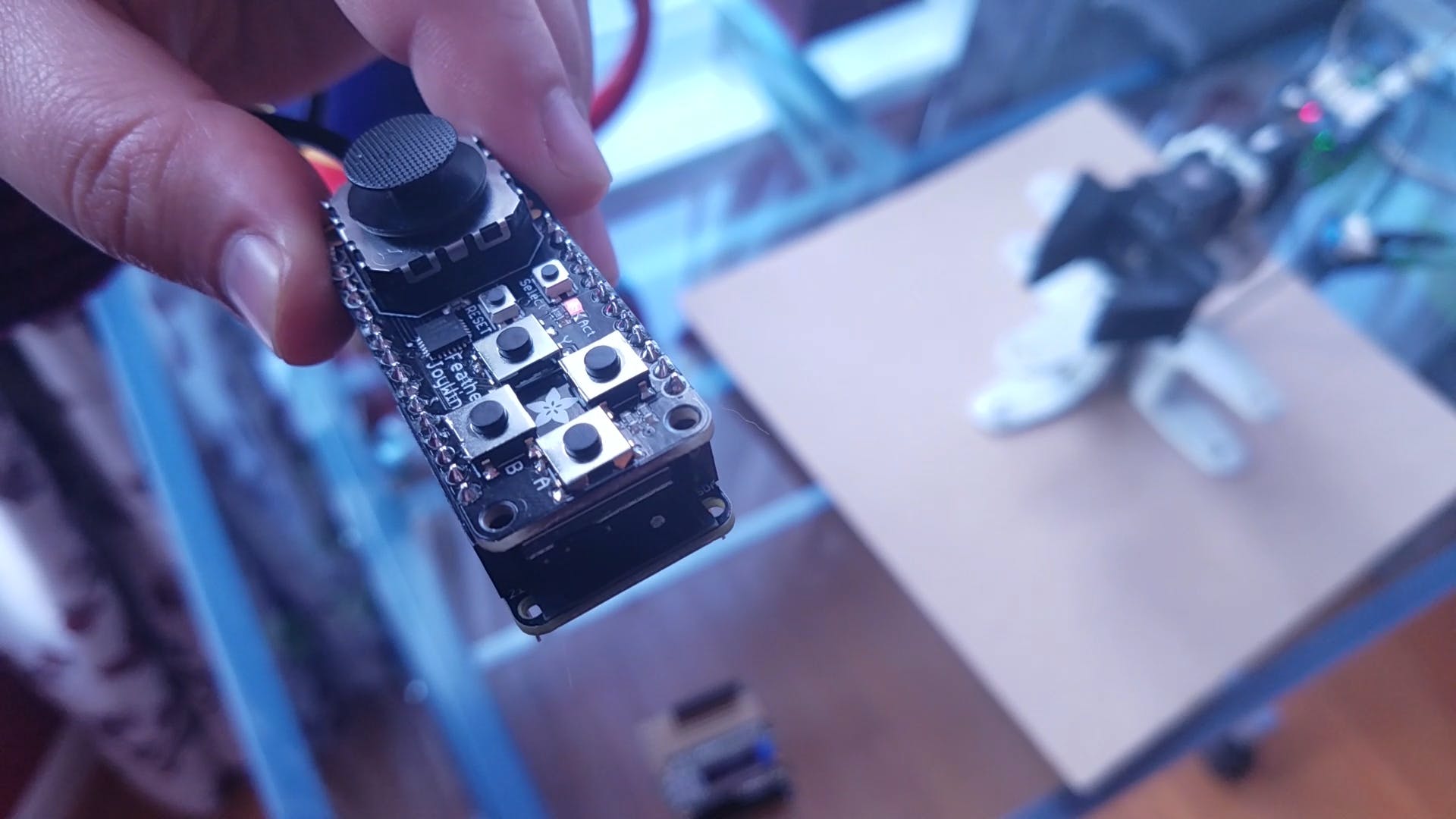
我们还注意到比带显示器的传输更稳定。
未来的工作
通过使用二进制命令而不是字符串来改善延迟。提高伺服定位时的运动平滑度。
谢谢阅读。:)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




