
资料下载


手势控制机器人开源硬件
李鑫
分享资料个
描述
介绍:
在电影中看到的用手控制事物的能力就像魔术一样,我很高兴知道它是如何工作的并在现实生活中尝试一下。所以我提出了一个非常好的项目,它是一辆可以通过将手朝你想要的方向移动来控制的汽车,汽车就会跟随!这是一个很酷的项目,而且非常简单!
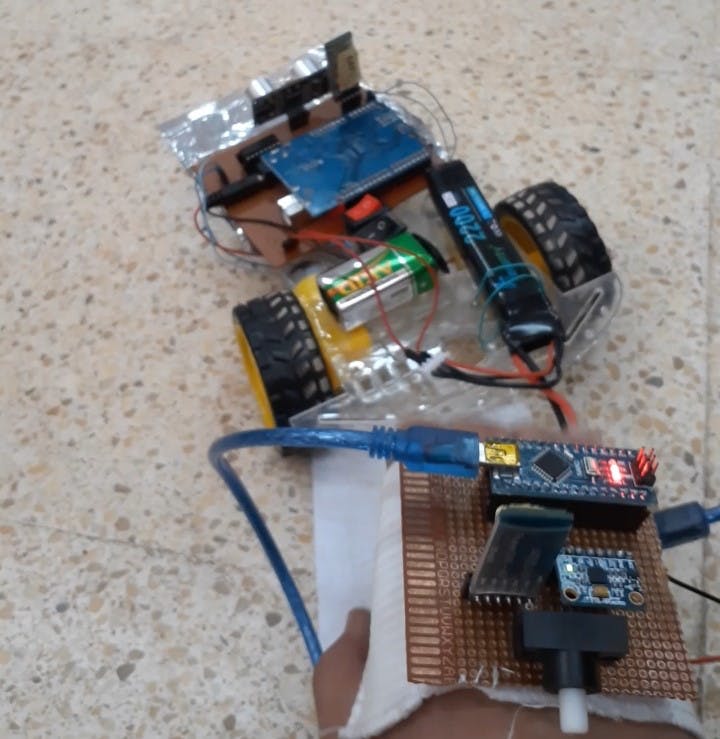
这个项目基本上由两部分组成,发射站放在手上,接收站是汽车。
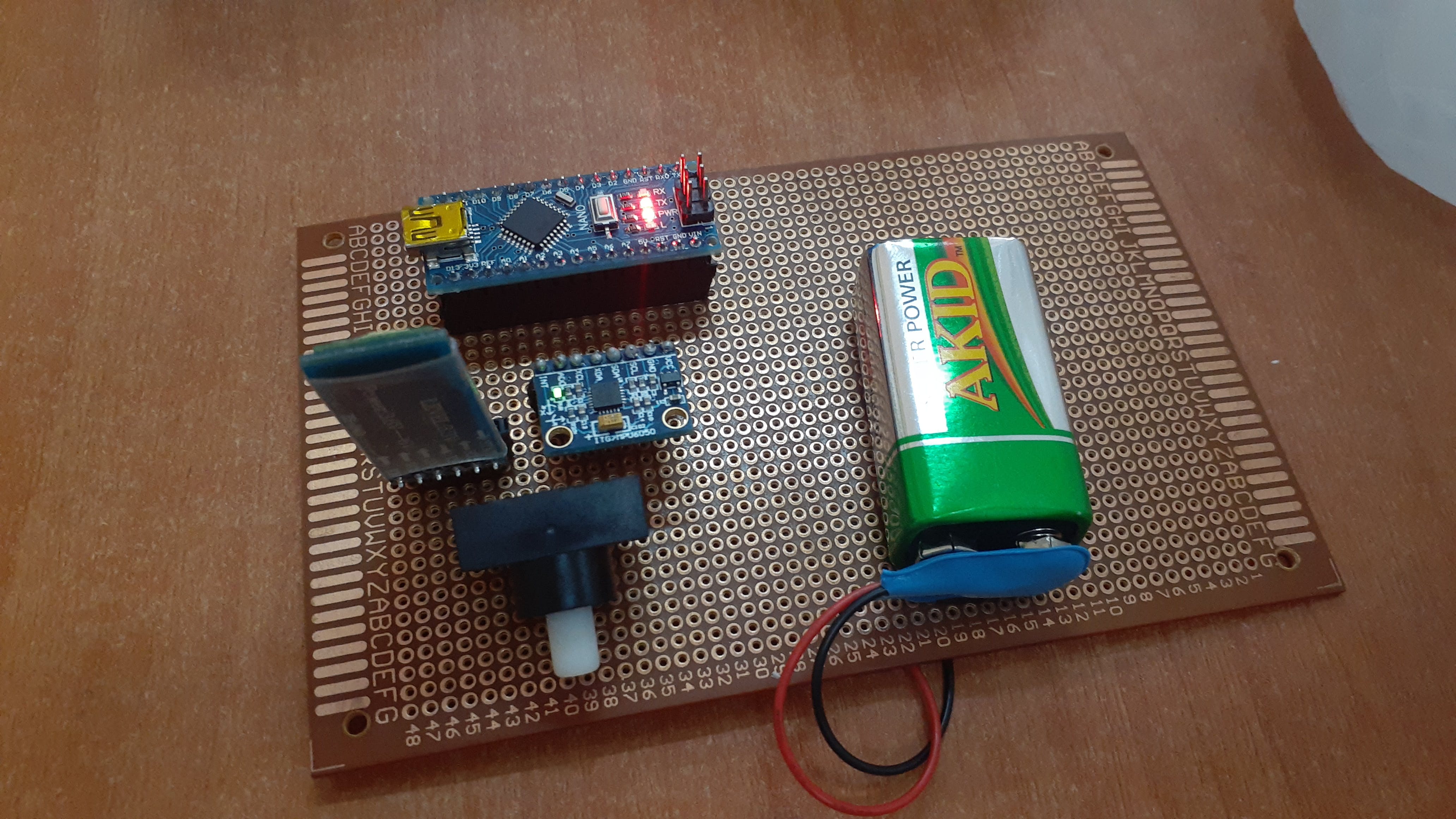
传输单元:
包含 Arduino nano(处理起来不重)
mpu6050传感器
蓝牙HC-05模块(master)
按钮,电池 9v。
所有组件都焊接在 PCB 板上。
MPU6050模块由两个内置传感器组成,分别是陀螺仪和加速度计,这些传感器中的每一个都提供数据并通过Arduino nano进行处理以获得合适的角度,然后根据输出数据发送特殊字符指定汽车将通过蓝牙模块选择的方向到汽车中的 Arduino UNO。传输单元的代码已在本项目的后半部分提供。
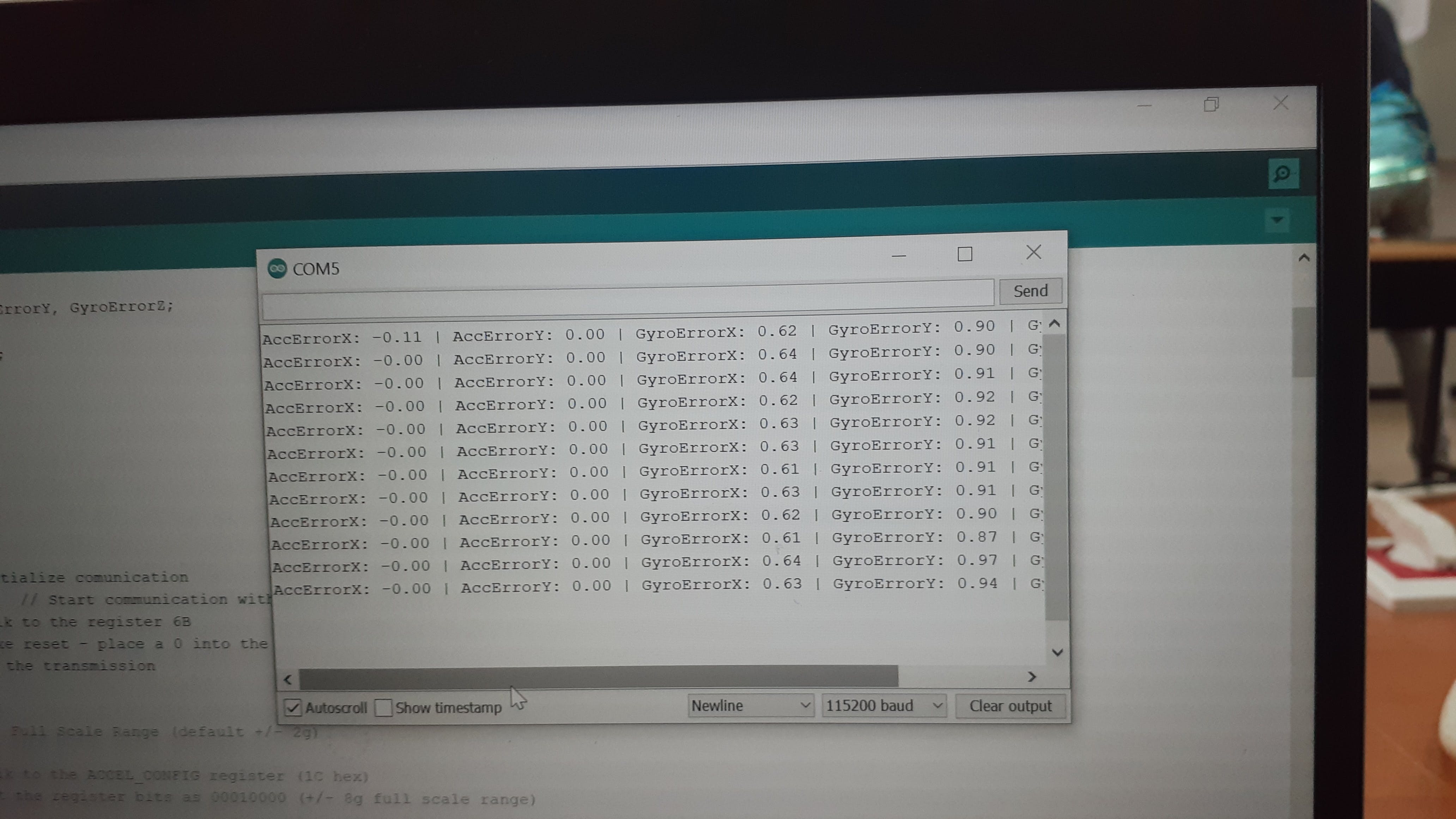
我使用的逻辑:
如果 x 轴上的值低于 -17,则应发送“ F” 。
- 如果 x 轴上的值高于 20,则应发送 ' B' 。
- 如果沿 y 轴的值高于 30,则应发送“ R” 。
- 如果该值小于 30,则应发送 ' L' 。
- 如果以上条件都不满足,那么它应该发送' S' 。
你会注意到我获得了偏航数据但我没有使用它来使手易于使用(可选)
接待单位:
基本上由Arduino UNO制成
蓝牙模块(从机):接收数据。
H桥l293d :控制电机的方向和速度。
9v 电池为 Arduino UNO 和其他组件供电。
12v 为电机供电。
超声波传感器:一个额外的传感器,以避免碰撞。
所有组件都焊接在 PCB 板上。
收到数据(特殊字符)后,根据为 Arduino UNO 编写的代码,小车将移动。
我使用的逻辑:
如果接收单元接收到字符“ F”,那么机器人应该向前移动。
- 如果是' B',那么机器人应该向后移动。
- 如果是“ R”,那么机器人应该向右移动。
- 如果是 ' L', 那么机器人应该向左移动。
- 如果是 ' S',那么机器人应该停止。
一些故障排除:
有时您的机器人不会朝正确的方向移动。在这种情况下,尝试找出哪个电机以这种方式运行。然后你可以从代码中调整它或者只是互换电机的电线。
有用!
如果你在这个项目中遇到任何问题,请在评论部分告诉我。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




