
资料下载


使用G Sensor智能手机控制的机器人车
李杰
分享资料个
描述
步骤1。
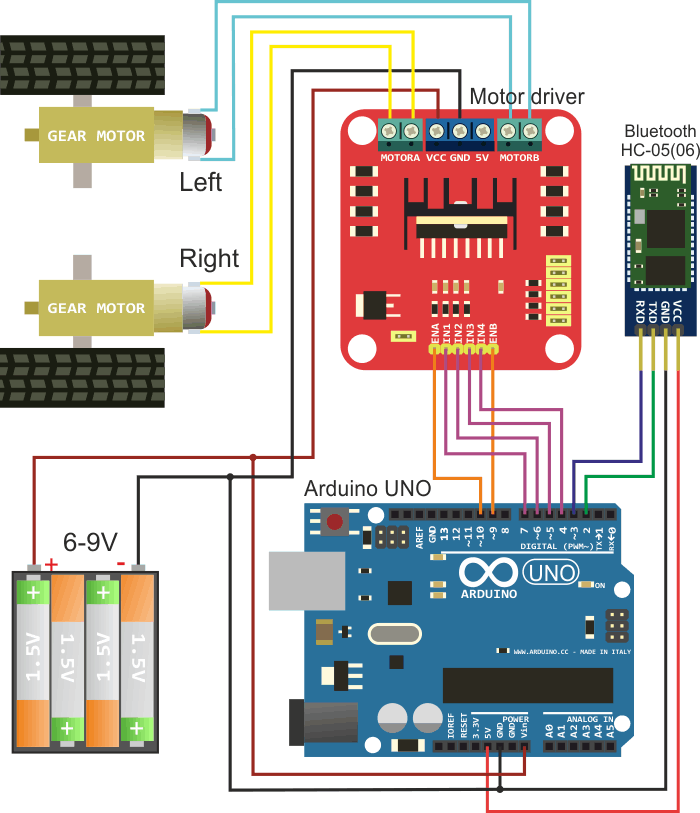
使用构建在两轮电路上的任何可用平台构建机器人汽车。电子元件的连接图如下图所示。您将需要 Arduino UNO 或兼容板、蓝牙 HC-05 (06) 模块、电机驱动器和电源电池。齿轮马达放置在平台上并强制移动机器人轮子。
第2步。
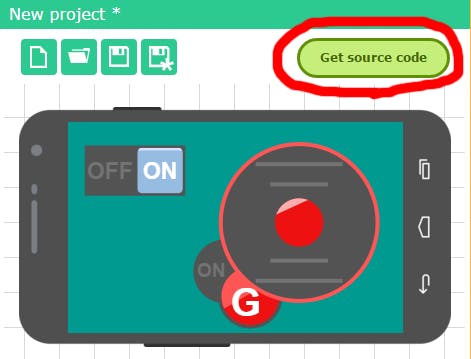
访问http://remotexy.com/en/editor/上的 RemoteXY 服务网站并创建一个图形用户界面来控制机器人。使用操纵杆的 G 传感器设置控制功能。界面示例如下图所示。单击“获取源代码”按钮。
步骤 3。
下载 GUI 源代码并在 Arduino IDE 中打开。对于编译,您需要 RemoteXY.h 库;您已经可以尝试在 Arduino 中加载代码并连接移动应用程序。但是,虽然这只是代码空白,但您需要添加连接图形界面和电机驱动器所需的功能。
第4步。
然后您需要使用图形界面将机器人控制功能添加到源代码中。为此,字段 RemoteXY 结构。RemoteXY 结构显示您的所有 GUI 控件。
生成的源代码如下所示。您可以编译它并将其上传到 Arduino。
步骤 5。
在上安装移动应用程序 RemoteXY 。当应用程序在移动设备上运行时,按下列表中的蓝牙按钮连接,选择您的蓝牙模块的名称,对于 HC-05 (06) 模块,名称通常为 INVOR 或 HC-06。
有用!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





