
资料下载


×
使用智能手机控制手臂机器人的开源项目
消耗积分:0 |
格式:zip |
大小:0.09 MB |
2023-02-03
绝代双骄
分享资料个
描述
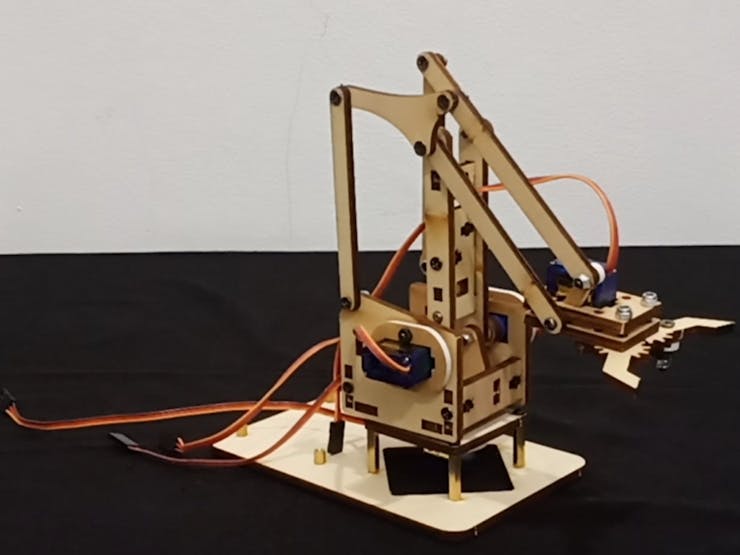
通常机器人可以自行移动,但有时我们需要控制它。在这个项目中,我将使用智能手机控制手臂机器人。手臂机器人有一个通过arduino控制的伺服电机。Arduino 从移动应用程序发送的数据中接收到移动伺服的命令。就像远程通信的人一样,我们需要一个无线设备,这里我使用蓝牙,以便 Arduino 和移动应用程序可以通信。
组件
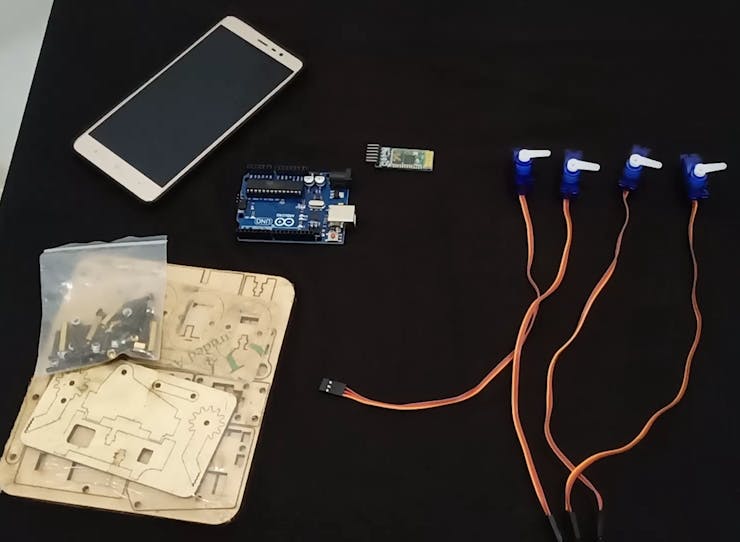
1.机械臂套件
2. Arduino Uno版本3
Arduino uno 用于对来自 PIR 传感器的输入进行编程并发送到手机
3.蓝牙HC-05
arduino 和移动应用程序之间的通信工具。
4.伺服塔临SG90
5.手机应用
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




