
资料下载


由MPU 6050控制的简单2轴伺服机械臂
蒲泛粟
分享资料个
描述
我将向您介绍 MPU-6050(加速度计+陀螺仪)传感器模块以及由它控制由微型伺服电机制成的简单 2 轴机械臂。
什么是 MPU-6050 传感器模块?
InvenSense MPU-6050 是具有六个自由度 (DOF)的低成本、高精度惯性测量单元 (IMU )。IMU 可以测量加速度、惯性和许多其他参数,以便您确定它们的空间位置和速度。它在单个芯片中包含一个 MEMS 3 轴加速度计和一个 MEMS 3 轴陀螺仪。它还有一个板载数字运动处理器 (DMP),可处理复杂的 6 轴 MotionFusion 算法。该传感器模块还能够通过辅助主 IIC 总线访问外部磁力计或其他传感器,以提供完整的 9 轴 MotionFusion 输出。MPU-6050 传感器模块还包含一个温度传感器,但精度较低。
可以使用 MPU-6050 的示例
- 汽车行业 - 部署安全气囊、车辆侧倾处理
- 游戏控制器 - Wii 遥控器/Wiimote
- 云台/相机稳定系统
- 硬盘驱动器
- 个人数字助理 - 智能手机、平板电脑
- 机器人技术
- 无人驾驶飞行器 (UAV) - 无人机、直升机
- 车辆导航
加速度计
该设备用于测量加速度,即特定物体的速度变化率。以恒定速度行进的物体将具有零加速度。
MPU-6050 中的加速度计是一个三轴加速度计,这意味着它可以感应 X、Y 和 Z 轴上的加速度。
陀螺仪
这是 MPU-6050 中的另一个关键组件,可以测量角动量或绕 X、Y 和 Z 轴的旋转。
MEMS 陀螺仪由三个传感器组成,每个轴一个,旋转时会产生电压。该电压使用 16 位模数转换器在内部进行采样。
引脚排列
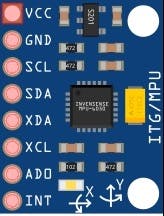
- VCC - 3.3V 直流电源
- GND - 接地
- SCL - 串行时钟
- SDA - 串行数据
- XDA - 辅助串行数据(当另一个传感器连接到此模块时使用)
- XCL - 辅助串行时钟(当另一个传感器连接到此模块时使用)
- AD0 - I2C 地址位。允许您更改 MPU-6050 模块的内部 I2C 地址。如果模块与另一个 I2C 设备发生冲突,或者您希望在同一 I2C 总线上使用两个 MPU-6050,则可以使用它。
- INT - 中断输出
将 MPU-6050 传感器模块与 Arduino 连接
要将 MPU-6050 与 Arduino 连接,您将需要 Jeff Rowberg 的I2C 开发库和MPU-6050 库。要了解有关图书馆的更多信息,请访问Jeff 的网站。
这些库将以 .ZIP 格式下载,您可以直接将这些文件夹添加到您的 Arduino IDE。
- 打开你的 Arduino IDE。
- 从顶部菜单栏中转到草图菜单。
- 选择包括库。
- 选择 Add.ZIP library... 选项。
- 导航到下载文件夹或保存 .ZIP 库的任何其他文件夹并选择它。
- 您将在 Arduino IDE 底部看到一条消息,说明该库已添加到您的列表中。
- 重复这些步骤以添加您的第二个库。
现在您已经添加了两个基本库,请尝试打开示例草图并将其上传到您的 Arduino 微控制器板上。通过旋转 MPU-6050 传感器模块进行试验,并观察串行监视器中显示的读数产生的变化。
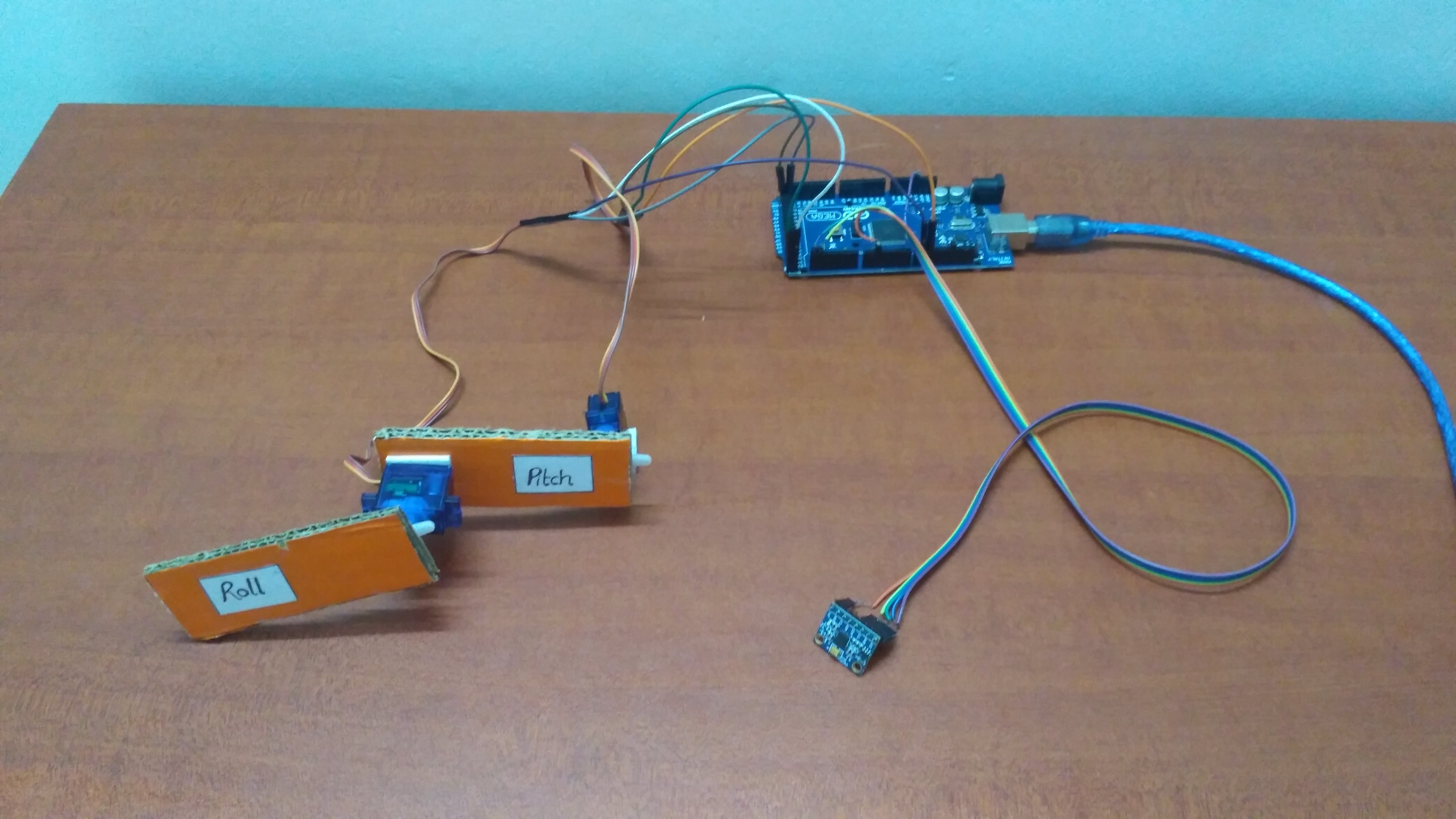
设置
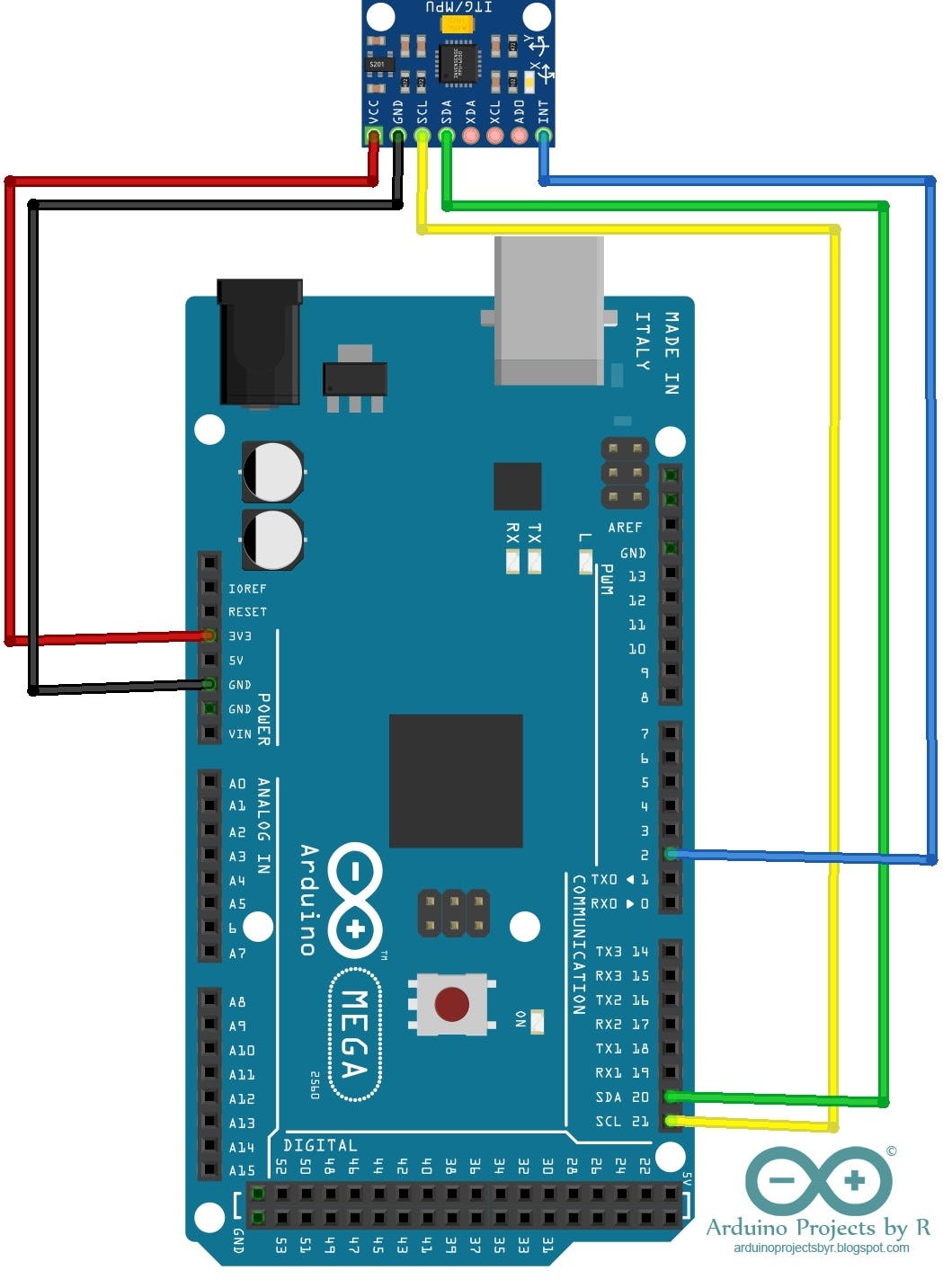
连接
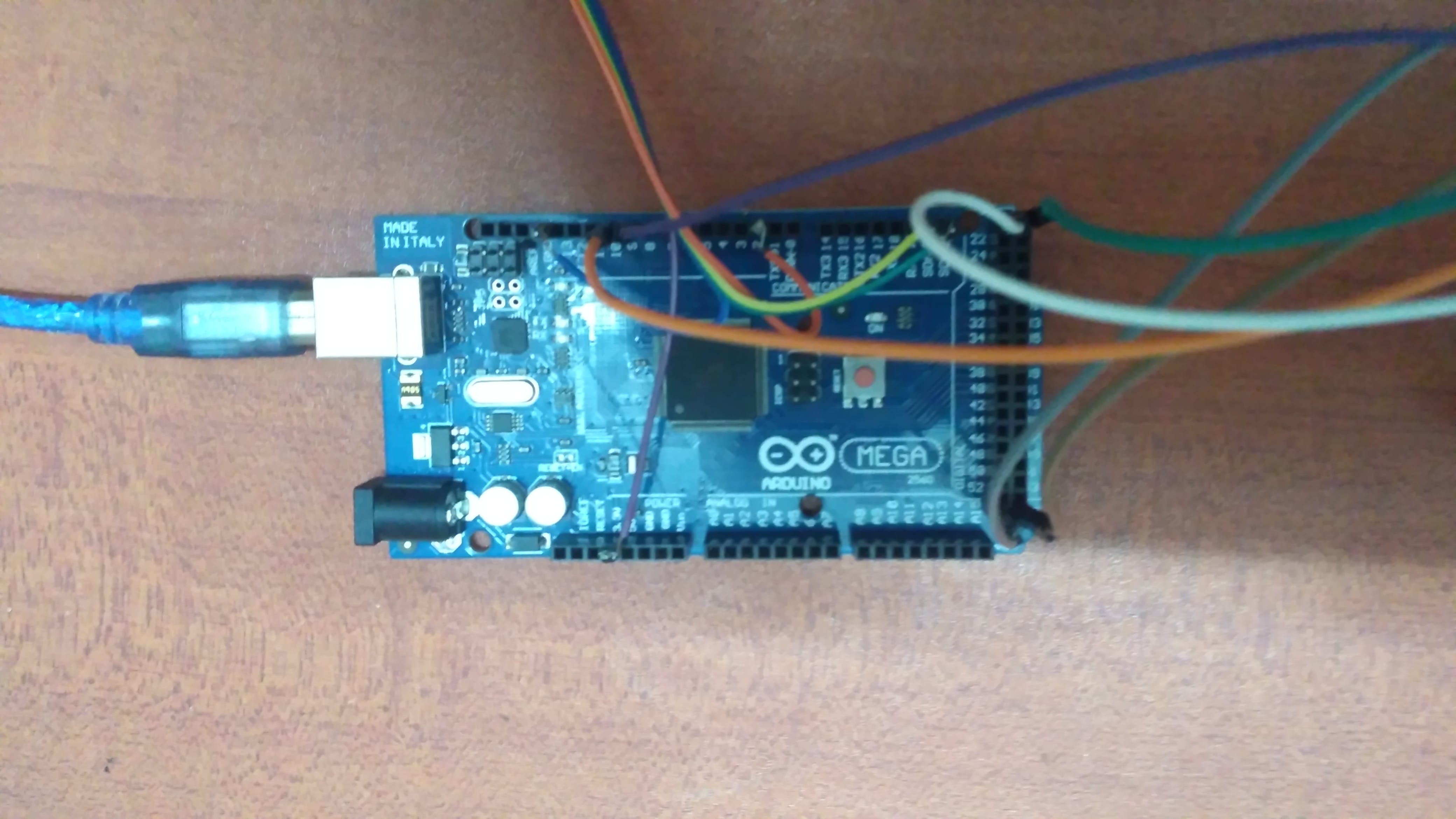
*注:原理图可在原理图部分找到。
MPU-6050 传感器模块
- VCC - 3.3V
- GND - 接地
- SDA - D20(Arduino Mega 2560)、A4(Arduino Uno 和 Nano)
- SCL - D21(Arduino Mega 2560)、A5(Arduino Uno 和 Nano)
- INT - D2
微型伺服电机(滚轮)
- S(黄色/橙色)- D9
- + (红色) - 5V
- - (黑色/棕色) - GND
微型伺服电机(螺距)
- S(黄色/橙色)- D10
- + (红色) - 5V
- - (黑色/棕色) - GND
编码
正如我在上面已经提到的,您将需要 Jeff Rowberg 的I2C 开发库和MPU-6050 库来将 MPU-6050 传感器模块与 Arduino 微控制器板连接。要了解有关图书馆的更多信息,请访问Jeff 的网站。
从顶部菜单栏中转到文件菜单,然后从 MPU6050 库中选择 MPU6050_DMP6 示例草图。将其上传到您的 Arduino 微控制器板并观察传感器模块产生的读数。旋转传感器模块以注意变化并识别横滚、俯仰和偏航。横滚(纵轴)、俯仰(横轴)和偏航(纵轴)是飞机的主轴。
对于这个项目,我们将仅使用滚动和俯仰测量来控制简单的机械臂。机械臂由两个微型伺服电机制成,因此您需要微控制器的伺服库来控制伺服电机的运动。
使用attach() 函数声明伺服电机所连接的引脚,并在 void setup() 中将伺服电机的初始位置设置为零。如果您仔细阅读代码,您会注意到滚动测量值(以度为单位)表示为 ypr[2] * 180/M_PI。
旋转传感器模块并观察产生的测量值以计算偏移量和范围。最后,您应该使用此范围将测量值映射到伺服电机的位置。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





