
资料下载


×
建立有效跟踪天体(例如行星)的系统
消耗积分:0 |
格式:zip |
大小:0.13 MB |
2023-02-09
分享资料个
描述
简介
该项目旨在建立一个能够以相当高的准确度有效跟踪天体(例如行星)的系统。我们将使用一些算法以及用于计算的处理单元和伺服机制来显示行星的物理位置!该项目中使用的硬件非常基础和简单,因为该项目的主要重点是软件,即让人们了解算法及其实现。所以请忍受我的“未格式化”硬件。
不仅仅是行星追踪,您还将学到一些可以在其他项目中实施的其他重要内容:
- 使用开普勒算法进行行星跟踪
- 多种坐标系及其相互转换
- 云台编程和舵机映射(3.5 转舵机和 180 度舵机)
- MPU9250自动校准编程
- 使用 Madwicks/Mahony 滤波器稳定 Mpu 读数。
- 使用带 MPU9250 的 P 控制器进行偏航校正
这些步骤太详细以至于无法放在一个页面中,因此我将项目拆分为不同的页面:
- 第 1 步:使用密切元素计算赤经和赤纬及其转换为方位角和高度 [使用开普勒定律计算] 这是Hackster 链接。
- 第 2 步:电路(连接 GPS 模块 U-BLOX NEO-6M 或类似的,云台伺服)和伺服映射。这是黑客链接。注意:如果您不使用MPU9250,则必须将您的系统在其初始状态下对准北方向。
- 第 3 步:此步骤使用 MPU9250 进行自动北检测及其对齐,最好的部分是它的动态,即即使你不断改变(偏航角)或方位角对齐 ,它也会持续感知错误并动态纠正。这是黑客链接。
- 第 4 步:软件集成和轨迹预测。转到此部分以获取最终的 Arduino 代码。这是黑客链接。
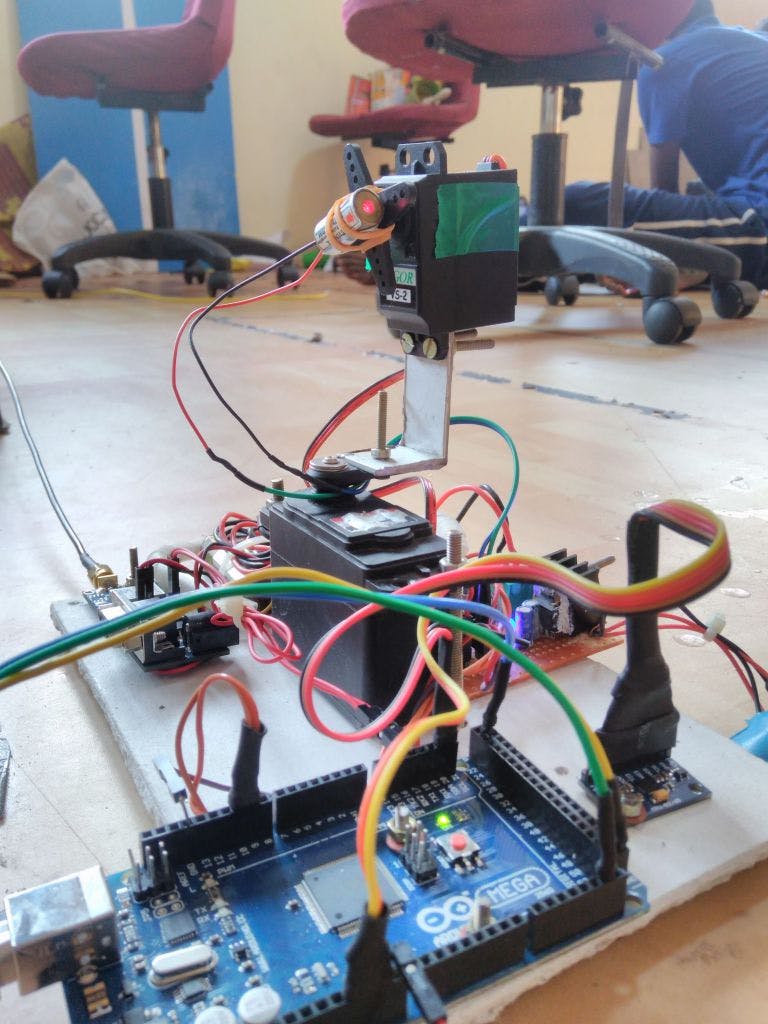
这是我与 Arduino Mega、MPU9250、ULBox GPS、Pan-Tilt Servos 和激光的最终 RTPT
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





