
资料下载


×
带步进器和IMU的M5Stick-C
消耗积分:0 |
格式:zip |
大小:0.00 MB |
2023-06-20
李秀珍
分享资料个
描述
这个项目只是一个实验,使用 rs485 在 6060 推送上移动步进器。它使用加速度计检查倾斜方向并相应地移动步进器。
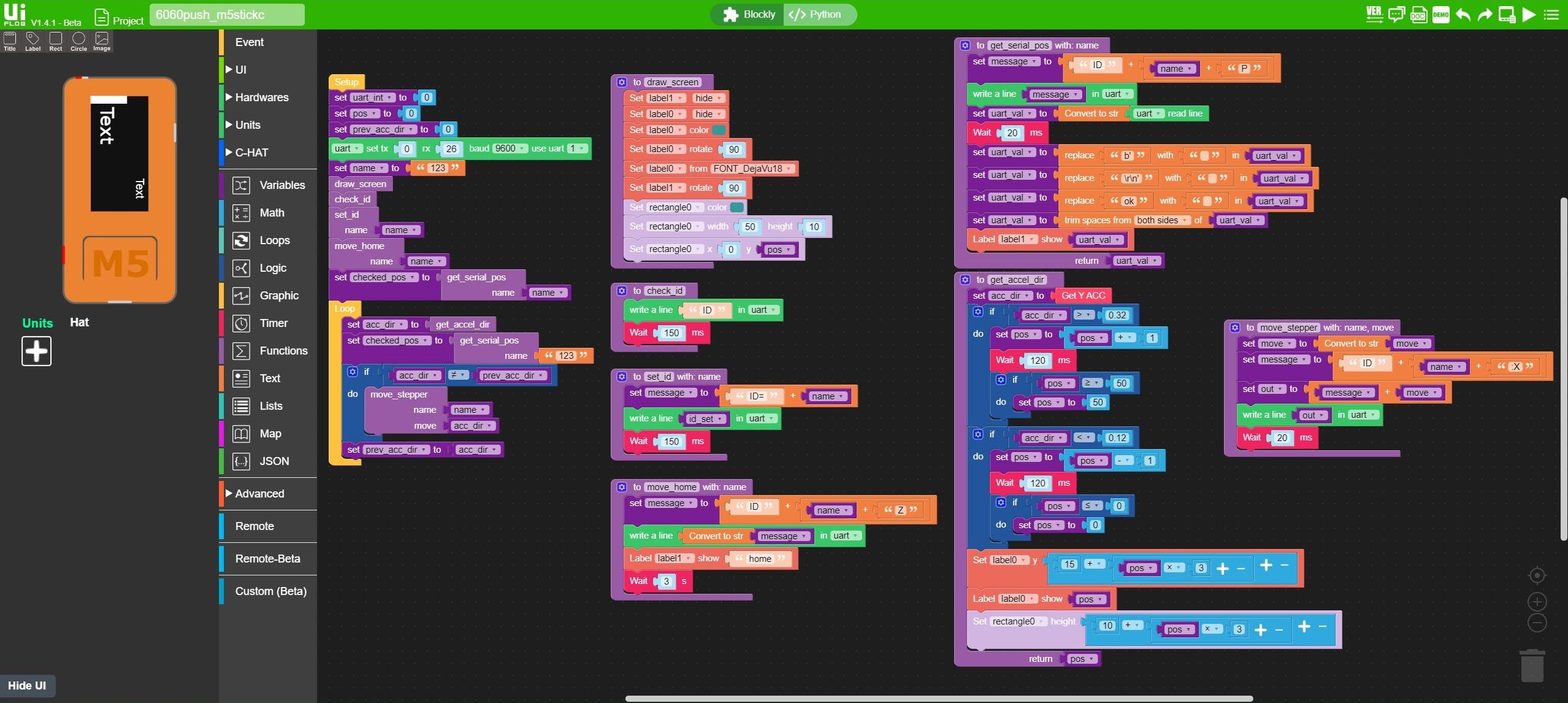
用于步进器和 RS485 反馈的 UIFLOW 代码块
from m5stack import *
from m5ui import *
from uiflow import *
import imu
setScreenColor(0x111111)
imu0 = imu.IMU()
label1 = M5TextBox(74, 114, "Text", lcd.FONT_Default,0xFFFFFF, rotate=90)
rectangle0 = M5Rect(0, 0, 50, 10, 0xFFFFFF, 0xFFFFFF)
label0 = M5TextBox(33, 15, "Text", lcd.FONT_DejaVu24,0xFFFFFF, rotate=90)
name = None
move = None
message = None
uart_val = None
uart_int = None
uart = None
acc_dir = None
pos = None
prev_acc_dir = None
out = None
id_set = None
checked_pos = None
def get_serial_pos(name):
global move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos
message = ('ID' + ((name + 'P')))
uart.write(str(message)+"\r\n")
uart_val = str((uart.readline()))
wait_ms(20)
uart_val = uart_val.replace("b'", '')
uart_val = uart_val.replace("\\r\\n'", '')
uart_val = uart_val.replace('ok', '')
uart_val = uart_val.strip()
label1.setText(str(uart_val))
return uart_val
def draw_screen():
global name, move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos
label1.hide()
label0.hide()
label0.setColor(0x339999)
label0.setRotate(90)
label0.setFont(lcd.FONT_DejaVu18)
label1.setRotate(90)
rectangle0.setBgColor(0x339999)
rectangle0.setSize(50, 10)
rectangle0.setPosition(0, pos)
def check_id():
global name, move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos
uart.write("ID"+"\r\n")
wait_ms(150)
def get_accel_dir():
global name, move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos
acc_dir = imu0.acceleration[1]
if acc_dir > 0.32:
pos = pos + 1
wait_ms(120)
if pos >= 50:
pos = 50
if acc_dir < 0.12:
pos = pos - 1
wait_ms(120)
if pos <= 0:
pos = 0
label0.setPosition(y=(15 + (pos * 3)))
label0.setText(str(pos))
rectangle0.setSize(height=(10 + (pos * 3)))
return pos
def move_stepper(name, move):
global message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos
move = str(move)
message = ('ID' + ((name + ':X')))
out = (message + move)
uart.write(str(out)+"\r\n")
wait_ms(20)
def set_id(name):
global move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos
message = ('ID=' + name)
uart.write(str(id_set)+"\r\n")
wait_ms(150)
def move_home(name):
global move, message, uart_val, uart_int, uart, acc_dir, pos, prev_acc_dir, out, id_set, checked_pos
message = ('ID' + ((name + 'Z')))
uart.write(str(str(message))+"\r\n")
label1.setText('home')
wait(3)
uart_int = 0
pos = 0
prev_acc_dir = 0
uart = machine.UART(1, tx=0, rx=26)
uart.init(9600, bits=8, parity=None, stop=1)
name = '123'
draw_screen()
check_id()
set_id(name)
move_home(name)
checked_pos = get_serial_pos(name)
while True:
acc_dir = get_accel_dir()
checked_pos = get_serial_pos('123')
if acc_dir != prev_acc_dir:
move_stepper(name, acc_dir)
prev_acc_dir = acc_dir
wait_ms(2)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






