
资料下载


DIY如何使用Visuino控制伺服电机角度
分享资料个
描述
在本教程中,我们将使用伺服电机和 Arduino UNO,以及 Visuino 使用序列组件控制伺服电机角度。
第 1 步:您需要什么
- Arduino UNO(或任何其他 Arduino)
- 跳线
- 伺服电机
- Visuino 程序:下载 Visuino
第 2 步:电路

- 将伺服电机“橙色”引脚连接到 Arduino 数字引脚[8]
- 将伺服电机“红色”引脚连接到 Arduino 正极引脚[5V]
- 将伺服电机“棕色”引脚连接到 Arduino 负极引脚[GND]
第 3 步:
您需要做的就是拖放组件并将它们连接在一起。Visuino 将为您创建工作代码,因此您不必浪费时间创建代码。它将快速轻松地为您完成所有艰苦的工作!Visuino 非常适合各种项目,您可以轻松构建复杂的项目!
下载最新强大的Visuino 软件
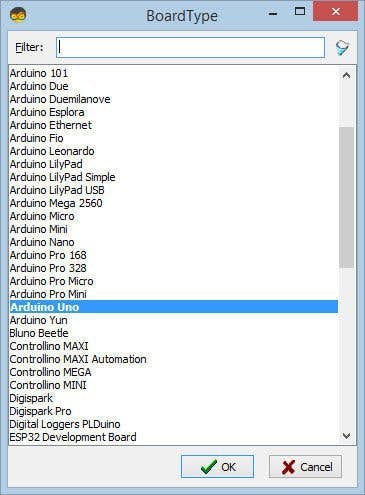
第 4 步:启动 Visuino,并选择 Arduino UNO Board Type
要开始对 Arduino 进行编程,您需要从此处安装 Arduino IDE:http ://www.arduino.cc/ 。
请注意,Arduino IDE 1.6.6 中存在一些严重错误。确保您安装的是 1.6.7 或更高版本,否则本教程将无法运行!如果您尚未按照本教程中的步骤设置 Arduino IDE 以对 Arduino UNO 进行编程!Visuino:https ://www.visuino.eu也需要安装。启动Visuino,如第一张图所示点击Visuino中Arduino组件(图1)上的“工具”按钮出现对话框时,选择“Arduino UNO”,如图2所示
第 5 步:在 Visuino 中添加组件
- 添加“序列”组件
- 添加 5x “模拟值”组件
- 添加“模拟多合并”组件
- 添加“除以模拟值”组件
- 添加“伺服”组件
第 6 步:在 Visuino 设置组件中
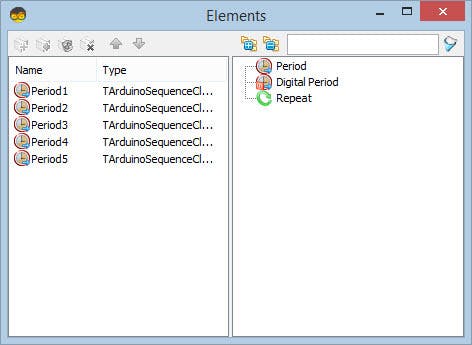
选择“Sequence1”组件,双击它。在“元素”对话框中:将 5 倍“周期”元素向左拖动。
向左拖动 5X“Period”元素。向左拖动 5X“Period”元素。
- 选择“Period1”元素并在属性窗口下将“延迟”设置为“1000”
- 选择“Period2”元素并在属性窗口下将“延迟”设置为“2000”
- 选择“Period3”元素并在属性窗口下将“延迟”设置为“3000”
- 选择“Period4”元素并在属性窗口下将“延迟”设置为“4000”
- 选择“Period5”元素并在属性窗口下将“延迟”设置为“5000”>>这将仅用于最后的暂停。
现在让我们设置伺服电机的度数:选择“AnalogValue1”组件并在属性窗口下将“值”设置为“0”
选择“AnalogValue2”组件并在属性窗口下将“Value”设置为“60”
选择“AnalogValue3”组件并在属性窗口下将“Value”设置为“120”
选择“AnalogValue4”组件并在属性窗口下将“Value”设置为“180”
选择“AnalogMultiMerger1”组件并在属性窗口下将“输入引脚”设置为“4”
选择“DivideByValue1”组件并在属性窗口下将“值”设置为“180”
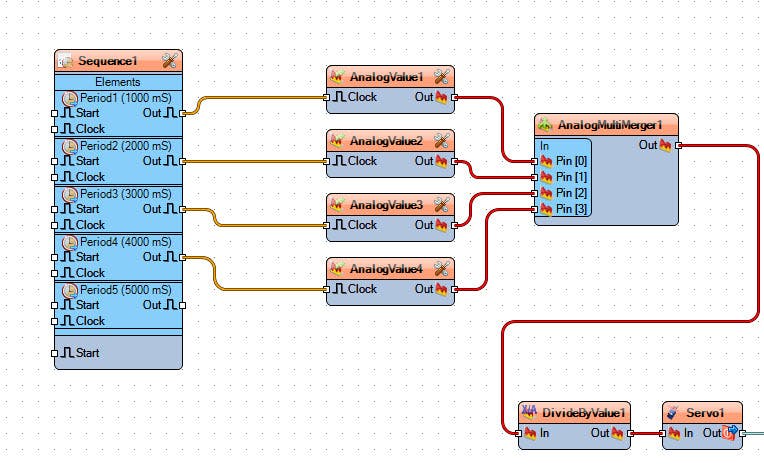
第 7 步:在 Visuino Connect 组件中
- 将“Sequence1”>Period1 引脚 [Out] 连接到“AnalogValue1”引脚 [clock]
- 将“Sequence2”>Period1 引脚 [Out] 连接到“AnalogValue2”引脚 [clock]
- 将“Sequence3”>Period1 引脚 [Out] 连接到“AnalogValue3”引脚 [clock]
- 将“Sequence4”>Period1 引脚 [Out] 连接到“AnalogValue4”引脚 [clock]
- 将“AnalogValue1”引脚 [Out] 连接到“AnalogMultiMerger1”引脚 [0]
- 将“AnalogValue2”引脚 [Out] 连接到“AnalogMultiMerger1”引脚 [1]
- 将“AnalogValue3”引脚 [Out] 连接到“AnalogMultiMerger1”引脚 [2]
- 将“AnalogValue4”引脚 [Out] 连接到“AnalogMultiMerger1”引脚 [3]
- 将“AnalogMultiMerger1”引脚 [Out] 连接到“DivideByValue1”引脚 [In]
- 将“DivideByValue1”引脚 [Out] 连接到“Servo1”引脚 [In]
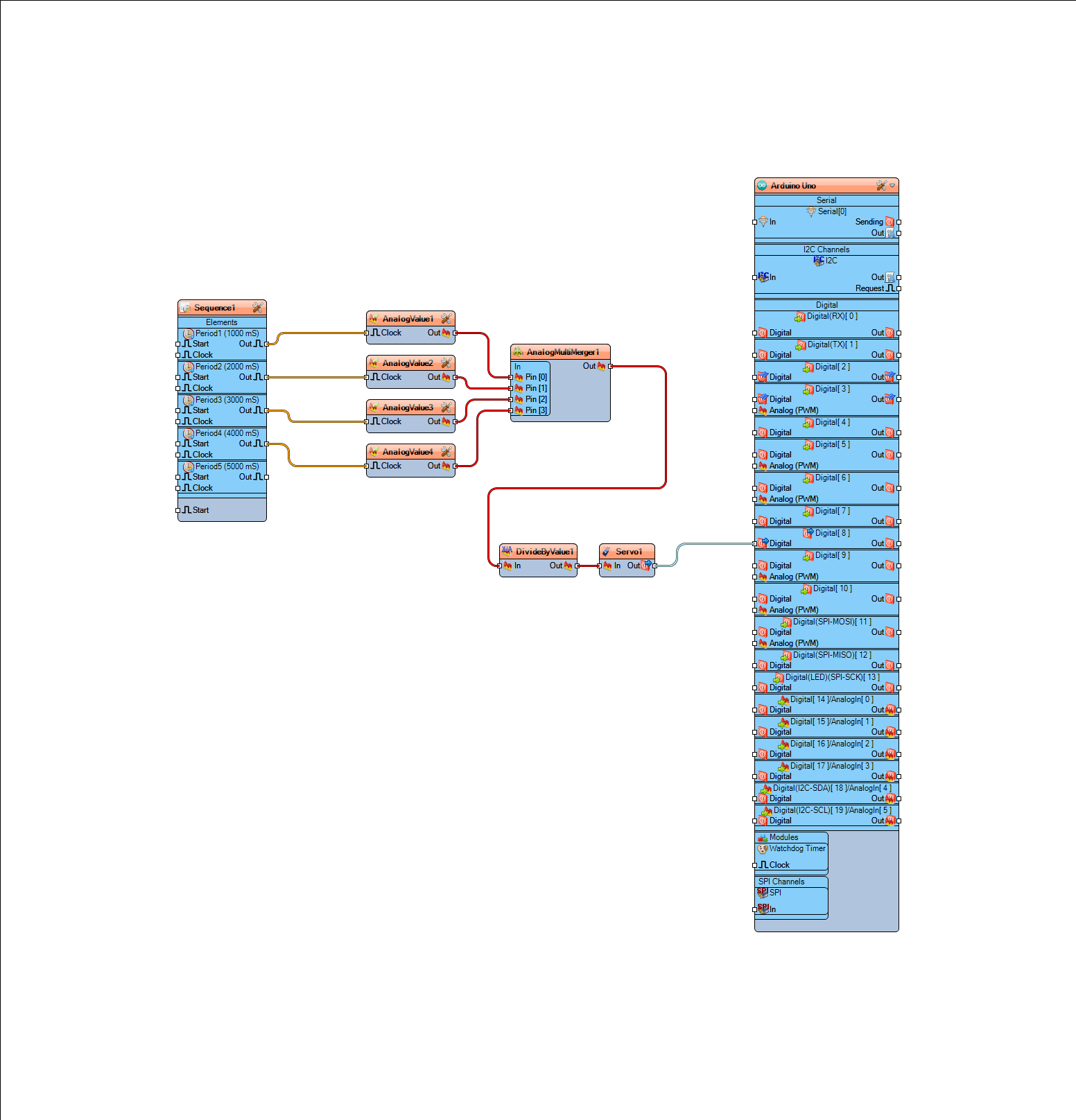
- 将“Servo1”引脚 [Out] 连接到 Arduino 数字引脚 [8]
第 8 步:生成、编译和上传 Arduino 代码
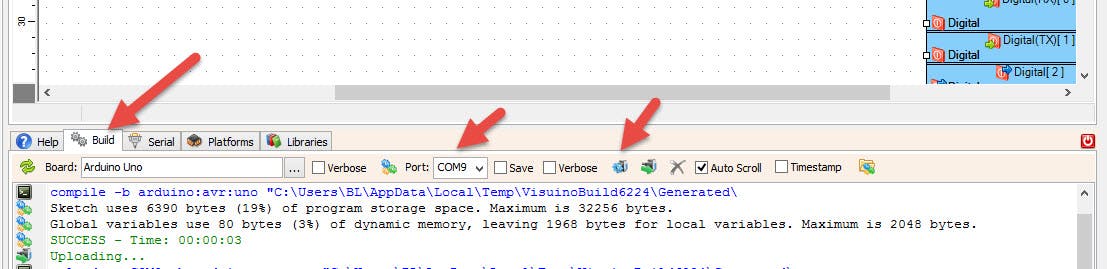
在 Visuino 中,在底部单击“构建”选项卡,确保选择了正确的端口,然后单击“编译/构建和上传”按钮。
第 9 步:播放
如果您为 Arduino UNO 模块供电,伺服电机将根据您设置的角度开始移动。
恭喜!您已经使用 Visuino 完成了您的项目。还附上了我为本教程创建的 Visuino 项目。您可以在 Visuino 中下载并打开它:https ://www.visuino.eu
第 10 步:其他 Visuino 教程
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





