
资料下载


×
基于ATmega32的遥控采摘机器人设计
消耗积分:0 |
格式:pdf |
大小:1.02 MB |
2012-03-22
分享资料个
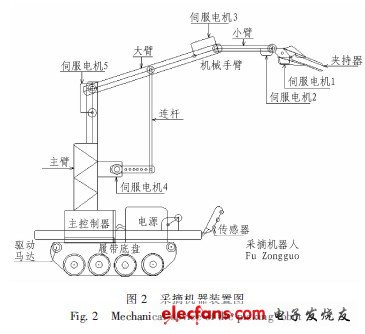
针对机器视觉采摘机器存在的技术不成熟,成本过高等不足,提出采用人工操控的半自动采摘技术,并进行了探索研究。设计了一款模拟采摘机器人,机器人以履带底盘为基座,三自由度机械臂,红外遥控操作。硬件电路以ATmega32为系统控制核心,采摘机器人的动作采用BL35P12为核心红外遥控控制。系统软件基于AVR Studio4开发环境,实现对机械臂运动的全方位精确控制。采摘机器人采用模块化设计,抓取速度快,成本低,易于实现,可扩展性强。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




