
资料下载


×
基于变论域理论的模糊自适应控制方法研究侯洪庆
消耗积分:1 |
格式:pdf |
大小:1817KB |
2017-03-08
#Freedom
分享资料个
基于变论域理论的模糊自适应控制方法研究_侯洪庆
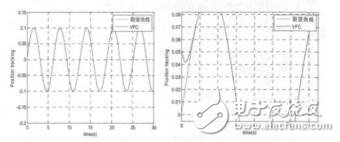
随着控制系统的自动化程度以及复杂程度不断提高,对复杂的非线性和变参数系统迫切要求更精密更有效的控制方案。利用传统的控制方法处理多种非线性不确定系统是很困难的, 模糊系统对于处理不确定性是非常有效的方法。模糊控制具有高度的仿人智能特性,其不依赖精确数学模型的特点和具有较强的鲁棒性与适应性是解决复杂控制问题的一种有效方法。模糊控制也有其自身缺点,模糊控制的控制精度较低,模糊控制器的隶属度函数、控制规则是根据经验预先总结确定的,在控制过程中无法进行修正,不具有学习和适应的能力。李洪兴提出了变论域的思想,变论域模糊控制是指在模糊规则形式不变的前提下,论域随着误差变小而收缩,或者随着误差增大而扩展,从而达到提高控制精度的目的,是一种根据误差在线调整论域及控制器输出的自适应模糊控制。倒立摆是一个典型的多变量、非线性、强藕合和快速运动的自然不稳定体,在控制过程中能有效地反映控制中的镇定、非线性、跟踪等许多关键问题。本文以倒立摆为研究对象,用变论域模糊自适应控制来估计系统的不确定非线性项,并设计控制器实现对系统的跟踪。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




