
资料下载


×
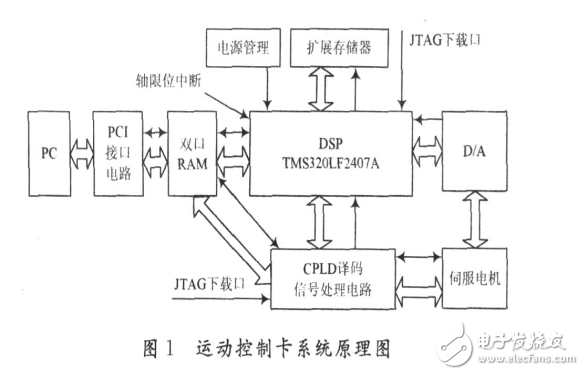
运动伺服控制系统采用DSP+CPLD的硬件平台
消耗积分:0 |
格式:rar |
大小:0.25 MB |
2017-09-01
分享资料个
随着先进制造技术的迅速发展,对运动控制的精度要求也越来越高,而运动伺服控制系统的性能很大程度上取决于伺服控制算法,通过运动控制与智能控制的融合,从改进传统的PID控制,到现代的最优控制、自适应控制、智能控制技术,应用先进的智能控制策略达到高质量的运动控制效果,已经成为当前研究的一个热点。
由于运动伺服控制系统中存在负载模型参数的变化,机械摩擦、电机饱和等非线性因素,造成受控对象的非线性和模型不确定性,使得需要依靠精确的数学模型,系统模型参数的常规PID控制很难获得超高精度、快响应的运动轨迹的要求。因此伺服控制系统越来越多采用PID与其他新型控制算法相结合的控制方式,如人工智能与专家系统、模糊控制、人工神经网络、遗传算法等,这里设计了一种基于神经网络控制算法的运动伺服控制卡,采用DSP+CPLD的硬件平台,采用单神经元PID与CMAC并行控制的伺服控制算法,通过对伺服电机的控制实现对位置的闭环控制。仿真和实践结果证明,这种运动控制算法有鲁棒性和抗干扰能力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




