
资料下载


欧盟研发机器人BAGER及其功能介绍
分享资料个
如今你可以在天空、水下、太空、汽车驾驶座上找到机器人的身影,但是能在地下自如活动的机器人还没有被发明。今年1月,欧盟设立了一个机器人开发项目,专门研发用于执行地下钻孔、工程定位、绘制地图、导航等任务的机器人。
这款机器人名为BAGER(roBot for Autonomous unDerGround trenchless opERations, mapping and navigation)——自动地下钻孔、绘图、导航机器人——中文名为“獾”(一种生活在地底洞穴的生物),可用于各类工程建筑项目,如挖掘管道和安装电缆。“獾”不是第一台自埋式挖掘机器人,但它克服了以往机器人、挖掘机的多项缺点:
1.无法独立检测障碍物,高度依赖人工指挥;
2.无法构建复杂的地下隧道网络,大多数只能走直线;
3.价格昂贵。
“獾”能根据导航指示自动在地下为管道铺设挖掘隧道,还可搭载3D打印模组,在钻孔的同时打印墙壁。它的钻孔方式结合了旋转和冲击钻井技术,锥形头部雕有扭纹曲线,配备超声波,能粉碎前进道路上的岩石。“獾”的整体构造是模块化的,它的驱动模块、联动装置、工具模块都可根据需要进行位置调整,工作时,它会仿照蠕虫蠕动式前进。
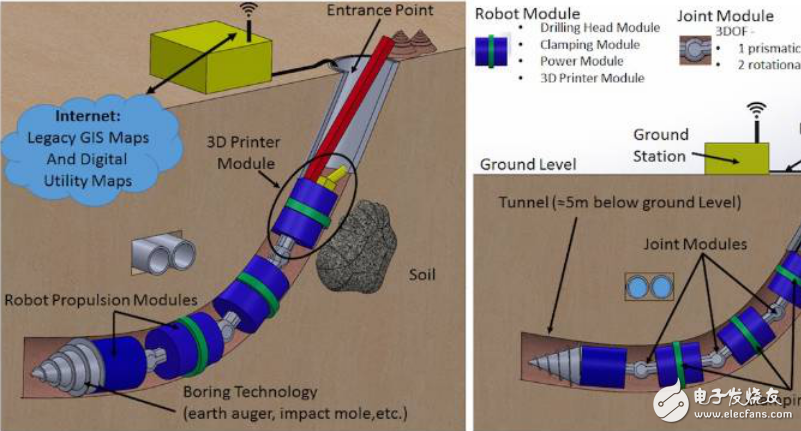
机器人工作需要配备地面穿透雷达天线组,信号接通后,地面人员能实时定位机器人位置,保证工程的正常进行。“獾”自身也装有电子导航传感器和激光传感器,能有效避开各类障碍物,如岩石、其他管道或是地下生物。
据悉,“獾”项目由来自马德里卡洛斯三世大学的3位教授主要负责,参与项目的还包括来自5个欧洲国家的7个机器人研发机构。该项目预计将在未来三年内收到370万欧元(约2800万人民币)资金赞助,但是由于才刚启动,挖掘机器人“獾”还只是个概念。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





