
资料下载


×
基于柔性机器人的振动抑制轨迹算法设计应用
消耗积分:0 |
格式:rar |
大小:0.26 MB |
2017-10-17
分享资料个
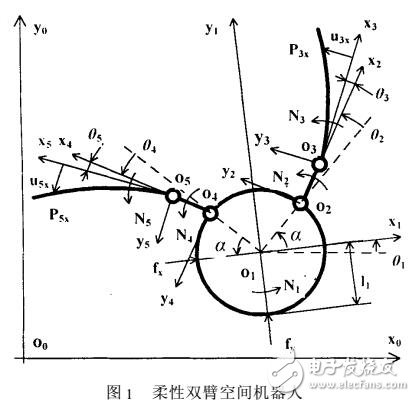
本文首次提出了一个描述柔性空间机器人振动的可直接计算的激振力指标,进而提出了柔性空间机器人抑振轨迹规划算法。该算法采用均匀非周期四阶B 样条描述机器人的运动轨迹,B 样条的控制点作为优化参数,使用改进的微粒群优化算法,以激振力为性能指标对轨迹进行优化求解。该方法根据激振力指标而不是待定轨迹的控制结果来判定轨迹的抑振性能,极大地简化了规划过程。对柔性双臂空间该机器人的抑振轨迹规划仿真,表明优化轨迹取得了良好的振动抑制效果,证明了算法的有效性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




