
资料下载


×
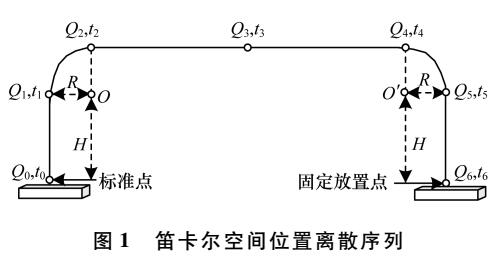
Delta机器人最优轨迹规划
消耗积分:1 |
格式:rar |
大小:1.68 MB |
2018-03-20
分享资料个
为提高Delta机器人的动作速度,提出一种离线寻优与在线查询相结合的时间最优轨迹规划方法。网格化机器人主传送带上的工作区域,选择每个网格中心点为标准点,在笛卡尔空间采用直线、圆弧插值获得门型轨迹的位置离散序列,经逆运动学计算出对应关节空间的角度离散序列。采用引力搜索的粒子群算法,以时间最优为适应度函数,在满足关节速度、加速度、脉动连续平滑及约束的条件下,构造7次B样条曲线,获取离线插值关节空间的角度一时间节点序列,并利用在线查询三维数组的方式获得最优时间节点序列。实验结果表明,该方法简单易行,以实验室Delta机器人为例,将主传送带上的物件抓取到固定位置,所用时间范围为0.676 1 s-0.786 9 s,克服了传统轨迹规划方法运动速度较慢的不足。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




