
资料下载


×
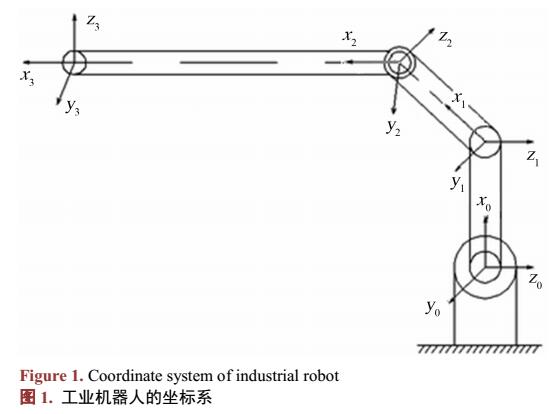
工业机器人空间运行轨迹规划
消耗积分:1 |
格式:rar |
大小:0.99 MB |
2018-04-19
分享资料个
随着工业自动化技术的发展,具有较高的智能水平的工业机器人逐渐成为工业生产线中的重要组成部分,促进了生产线向着高节拍、高柔性化的方向发展。当然,利用工业机器人代替人工作业,可减轻工人的劳动强度,提高劳动率。但机器代替人工作业,需要进行运行轨迹设计和运动学分析,即进行机械人各关节的运行轨迹和速度及加速度分析,而多连杆机构组成的机器人是多自由度的串联空间机构,其运动学和动力学问题分析难度很大。
目前,生产企业技术人员普遍根据生产经验,参考产品图纸和工艺卡及车间设备布局,规划出运行轨迹,并编制程序写入相应的设备中,现场技术人员根据规划运行轨迹实时调试机器人,最终根据生产现场实制订一条无碰撞的运行轨迹。这种依赖技术人员经验的运行轨迹方法缺乏严格的理论依据,会因人而异,难于保证所规划的运行轨迹是最优的,也有可能导致设备之间发生干涉的现象。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




