
资料下载


×
机器人的轨迹规划与生成
消耗积分:0 |
格式:rar |
大小:2.16 MB |
2017-10-13
分享资料个
所谓机器人的规划(P1anning),指的是——机器人根据自身的任务,求得完成这一任务的解决方案的过程。这里所说的任务,具有广义的概念,既可以指机器人要完成的某一具体任务,也可以是机器人的某个动作,比如手部或关节的某个规定的运动等。
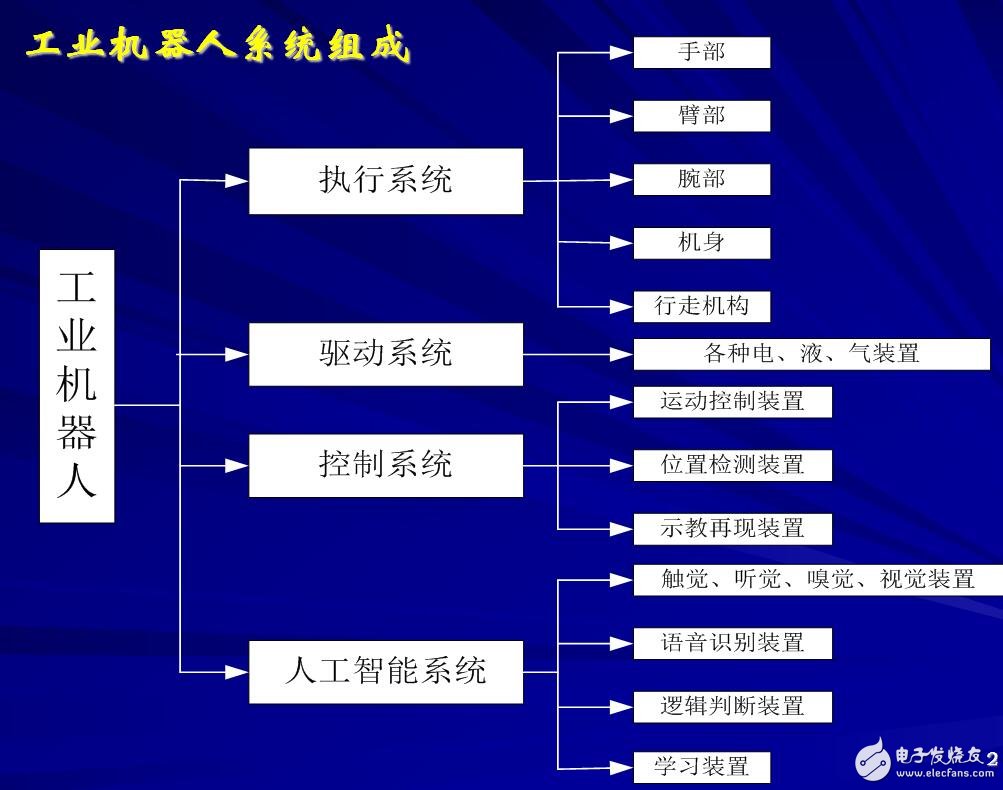
机器人的规划是分层次的,从高层的任务规划,动作规划到手部轨迹规划和关节轨迹规划,最后才是底层的控制(见图)。在上述例子中,我们没有讨论力的问题,实际上,对有些机器人来说,力的大小也是要控制的,这时,除了手部或关节的轨迹规划,还要进行手部和关节输出力的规划。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




