
资料下载


×
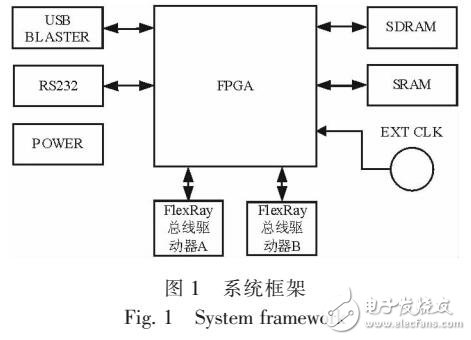
基于FPGA实现FLEXRAY通信控制器
消耗积分:0 |
格式:rar |
大小:0.95 MB |
2017-11-07
分享资料个
目前从航天工程角度来看,CAN和1553B的速率、可靠性和成本指标在航天系统中应用最为适宜。但是对于安全等级要求更高的系统则需一个新的标准。尤其是对故障容错与时间确定性需求不断增加的系统。FlexRay通过在确定的时隙中传递信息,以及在两个通道上的故障容错和冗余信息的传送,满足了这些新增加的要求。然而,集成着FlexRav IP的芯片目前主要满足的是汽车安全等级而不能满足宇航级。通过对集成着FlexRav IP核的CPU进行筛选和加固会导致芯片费用昂贵。基于以上问题,本文选用满足宇航级的FPCJA来实现FlexRav通信控制器,这种方法既可以简化FlexRav节点的硬件复杂度和成本,也为FlexRav的实现新添了一种方法。并且为其在航天领域的应用做出相应的研究。经测试可知两个节点可以正常稳定通信。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




