
资料下载


×
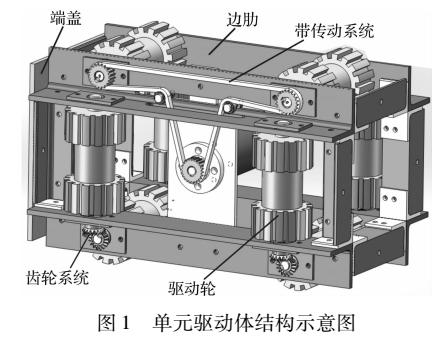
一种核管道机器人结构设计与驱动力分析
消耗积分:2 |
格式:rar |
大小:1.33 MB |
2018-03-02
分享资料个
针对人工方式进行核电管道检测与维护存在效率低的问题,将管道机器人技术应用到核电站管道维护巾,代替人工进行现场故障监测、异物探测和清理。设计了直径为300 mm的管道机器人的机械结构,分析了机器人在管道巾的受力情况以及驱动特性。同时设计了一种全新的单电机全驱动机构,这种设计使机器人整体结构更为紧凑,提高了机器人行进速度以及驱动负载能力。并利用ADAMS动力学仿真软件对机器人驱动特性进行了研究和分析。结果表明,机器人的驱动能力能够满足实际作业需求,并且其驱动能力与摩擦系数、斜坡度有关;其中驱动力与摩擦系数成正比,即摩擦系数越大机器人的驱动力越大;驱动力与斜坡度成反比,即斜坡度越大驱动力越小。该研究结果可为后续机器人优化设计提供理论依据。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






