
资料下载


×
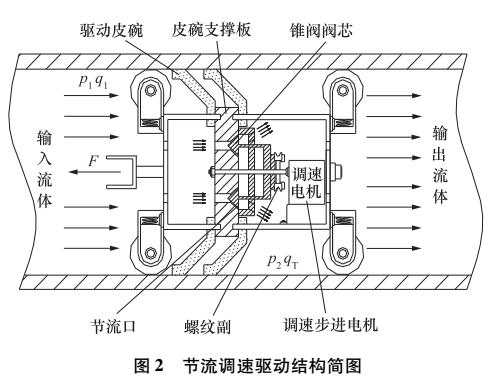
介质压差驱动管道机器人在线取能方法研究
消耗积分:2 |
格式:rar |
大小:1.09 MB |
2018-03-12
分享资料个
提出一种摩擦轮式在线取能的研究方法,阐述了新型锥阀调节式介质压差驱动管道机器人的运行调控机理。通过分析管道机器人驱动单元在管道内工况下运行速度、压力差及所受驱动力之间的关系,得到其负载特性。进而利用CFD软件对流体系统进行建模、合理设置参数及网格划分,验证了其在实际工况下的负载特性,仿真结果表明满足管道机器人检测作业的功率需求不小于200 W。依据能量参数指标和管道行业技术要求,管道内壁正压力不大于800 N的指标,研制出了具有按需自动启动停止收放、压力可调、跨越障碍等功能的摩擦轮式在线取能单元,与驱动单元协同作业实现在线取能,并存储于蓄电池中。为管道机器人在长输管道内作业的能源供给提供了新的解决方案。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




