
资料下载


×
一种新型的长臂式仿生生软体机器人结构
消耗积分:2 |
格式:rar |
大小:0.97 MB |
2018-03-07
分享资料个
伴随着机械制造、材料研发和控制技术的高速发展以及仿生学的深入研究,软体机器人得到了越来越多的关注。相对于刚性机器人而言,软体机器人具有在非结构复杂环境中与难以用准确的数学模型加以描述的复杂多变对象进行交互作业的能力,而且这类软体机器人一般具有充分的柔顺性、适应性、超冗余或无限自由度,甚至可以任意改变自身形状和尺寸以适应环境和目标。
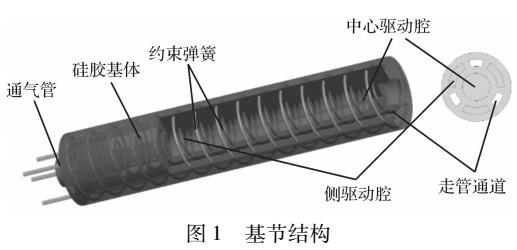
针对软体机器人结构化分析困难的问题,对软体机器人气腔耦合结构、嵌入式加强材料以及充气状态下的弯曲变形等方面进行了研究,提出了一种新型的长臂式仿生软体机器人结构,该结构为多腔、多节耦合,可以实现任意方向的大范围弯曲。通过力矩平衡方程建立了长臂式仿生软体机器人的静态模型及主动弯曲数学模型,并实现了基节的各个力矩的数值化近似求解。采用上、下位机控制思想,基于ITV气压比例阀搭建了实验平台并设计、制作了软体机器人样机进行测试。研究结果表明,弯曲运动实验结果与仿真曲线基本一致,由此验证了理论模型的正确性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





