
资料下载


×
柔性传动能力的微型管道机器人
消耗积分:1 |
格式:rar |
大小:1.75 MB |
2018-03-28
分享资料个
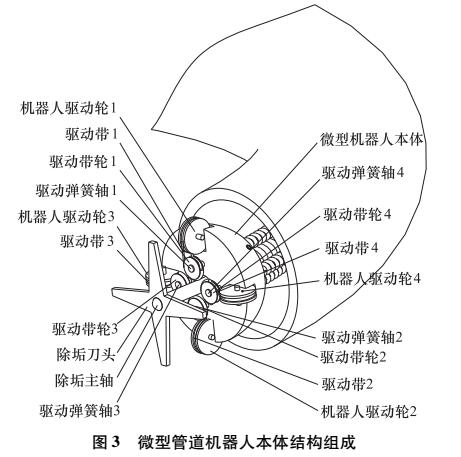
对现有的参考文献进行分析总结,发现影响管道机器人向微型化发展的主要制约因素为驱动功率与驱动体积的矛盾。为此,针对管径为70 mm左右的电厂110 MW冷凝器蒸汽回流管道的检测与除垢作业,提出了柔性钢丝弹簧轴驱动技术,通过由四根驱动钢丝弹簧软轴和四个驱动轮组成的差动行走单元,实现了机器人本体的小型化和驱动力的长距离传递,实现了机器人的驱动源外置和动力的柔性长距离传输,为其在管道内高效的完成任务奠定了基础。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






