
资料下载


×
PID控制经典教程之位置式PID控制原理(下)
消耗积分:1 |
格式:pdf |
大小:4.02 MB |
2018-06-08
sina_1983337651
分享资料个
当控制系统输出的被控变量长时间未达到给定值时,这段时间之内积分环节所产生的控制量将形成一个很大的积累值,PID控制器的输出控制量将由于积分环节的累积作用而不断增加。当控制量达到或超出执行机构的输入信号上下限时,此后执行机构将进入饱和区,不再随着输入控制量的增加而进一步的动作。当偏差值反向时,控制器的输出控制量需要很长时间才能够退出饱和区,在这段时间之内执行机构将停留在极限位置而暂时失去控制,使控制系统性能恶化。
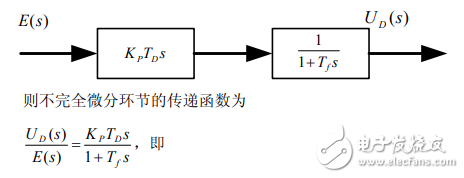
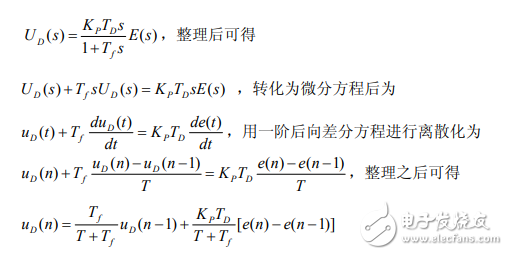
不完全微分算法即在原微分环节上添加一个具有低通滤波作用的惯性环节,其结构框图如下:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




