
资料下载


使用陀螺加速度计MPU6050的六轴模块的资料说明免费下载
aminzeng
分享资料个
此六轴模块采用先进的数字滤波技术(卡尔曼滤波),能有效降低测量噪声,提高测量精度。
姿态测量精度0.01度,稳定性极高,性能甚至优于某些专业的倾角仪!
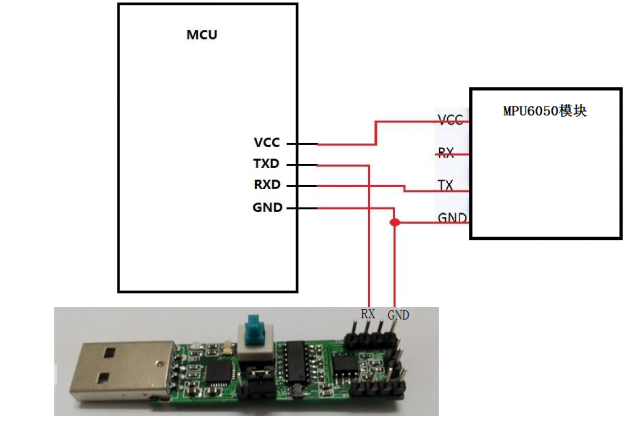
此六轴模块采用高精度的陀螺加速度计 MPU6050,通过处理器读取 MPU650 的测量数据然后通过串口输出,免去了用户自己去开发MPU6050 复杂的 I2C 协议,同时精心的 PCB 布局和工艺保证了 MPU6050 收到外接的干扰最小,测量的精度最高。
2性能参数
1、 电压:3V~24V
2、 电流:《10mA
3、 体积:17.8mm X 17.8mm 重量:1.1g
4、 焊盘间距:上下 100mil(2.54mm),左右 600mil(15.24mm)
5、 测量维度:加速度:3 维,角速度:3 维,姿态角:3 维
6、 量程:加速度:± 16g,角速度:± 2000°/s。
7、 分辨率:加速度:6.1e-5g,角速度:7.6e-3°/s。
8、 稳定性:加速度:0.01g,角速度 0.05°/s。
9、 姿态测量稳定度:0.01°。
10、 数据输出频率 100Hz(波特率 115200)/20Hz(波特率 9600)。 11、数据接口:串口(TTL 电平)
11、 波特率 115200kps/9600kps。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





