
资料下载


从入门到精通吃透PID电子版书籍PDF免费下载
ah此生不换
分享资料个
PID是什么?
要弄清楚怎样定量之前,我们先要理解一一个最基本的概念:调节器。调节器是干什么的?调节器就是人的大脑,就是一个调节系统的核心。任何一个控制系统,只要具备了带有PID的大脑或者说是控制方法,那它就是自动调节系统。如果没有带PID的控制方法呢?那可不一定不是自动调节系统,因为后来又涌现各种控制思想。比如时下研究风头最劲的模糊控制,以前还有神经元控制等等;后来又产生了具有自组织能力的调节系统,说白了也就是自动整定参数的能力;还有把模糊控制,或者神经元控制与PID结合在一起应用的综合控制等等。
在后而咱们还会有介绍。咱们这个文章,只要不加以特殊说明,都是指的是传统的PID控制。可以这样说:凡是具备控制思想和调节方法的系统都叫自动调节系统。而放置最核心的调节方法的东西叫做调节器。
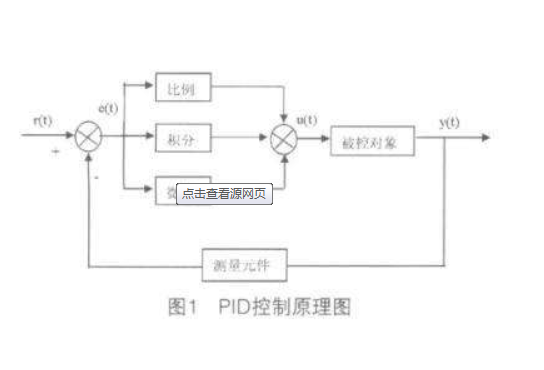
基本的调节器具有两个输入量:被调量和设定值。被调量就是反映被调节对象的实际波动的量值。比如水位温度压力等等:设定值顾名思义,是人们设定的值,也就是人们期望被调量需要达到的值。被调量肯定是经常变化的。而设定值可以是固定的,也可以是经常变化的,比如电厂的AGC系统,机组负荷的设定值就是个经常变化的量。
基本的调节器至少有一个模拟量输出。大脑根据情况运算之后要发布命令了,它发布一个精确的命令让执行机构去按照它的要求动作。在大脑和执行机构(手)之问还会有其他的环节,比如限幅、伺服放大器等等。有的限幅功能做在大脑里,有的伺服放大器做在执行机构里。
上面说的输入输出三个量是调节器最重要的量,其它还有许多辅助量。比如为了实现手自动切换,需要自动指令;为了安全,需要偏差报警等等。这些可以暂不考虑。为了思考的方便,咱们只要记住这三个量:设定值、被调量、输出指令。事实上,为了描述方便,大家习惯上更精简为两个量:输入偏差和输出指令。输入偏差是被调量和设定值之间的差值,这就不用罗嗦了吧?
回到刚才的提问:什么是PID?
P就是比例,就是输入偏差乘以-一个系数;
I就是积分,就是对输入偏差进行积分运算;
D就是微分,对输入偏差进行微分运算。
参数整定找最佳, 从小到大顺序查。先是比例后积分, 最后再把微分加。曲线振荡很频繁, 比例度盘要放大。曲线漂浮绕大弯, 比例度盘往小扳。曲线偏离回复慢, 积分时间往下降。曲线波动周期长,积分时间再 加长。曲线振荡频率快, 先把微分降下来。动差大来波动慢, 微分时间应加长。理想曲线两个波, 前高后低四比一看二调多分析, 调节质量不会低。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





