

KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤

KUKA机器人程序案例:流水生产线的搬运、码垛运动编程

KUKA8.2系统下C4机器人虚拟外部轴E1的设置深层分析V6.25

KUKA机器人ASCII码的运用
KUKA8.3系统WorkVisual AddOnVKR控制心得
KUKA大众标准与标准版机器人程序的不同

KUKA 机器人VASS6的更新系统文件

KUKA机器人点焊控制中F130两次铣削的应用

KUKA运用系统变量$MODE_OP编程
KUKA部件调试系统文件

KUKAC4机器人首次开机启动
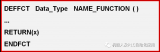
KUKA建立函数的方法和例子

KUKA 机器人电伺服焊钳配置
KUKA系统变量:$PROG_INFO

KUKA E6POS结构类型的变量定义
KUKA C4掉电极帽关水是咋回事

KUKA机器人制动-BRAKE V5.20操作程序
KUKA机器人系统函数:CIOCTL
KUKA机器人高级编程CREAD的用法详解

KUKA机器人高级编程之DEFDAT...ENDDAT

 下载APP
下载APP
 搜索内容
搜索内容
