
ROS系统是什么?ROS系统主要特点有哪些?创龙RK3568J+Debian的ROS2系统案例
TogetherROS目标检测运行方法

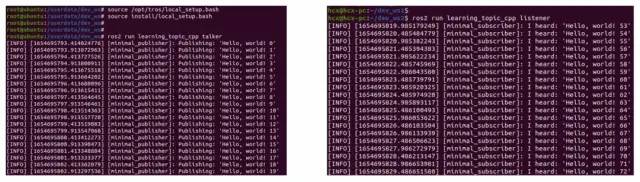
ROS2中自带例程测试
TogetherROS系统的通信功能测试
ROS模型建立常见错误
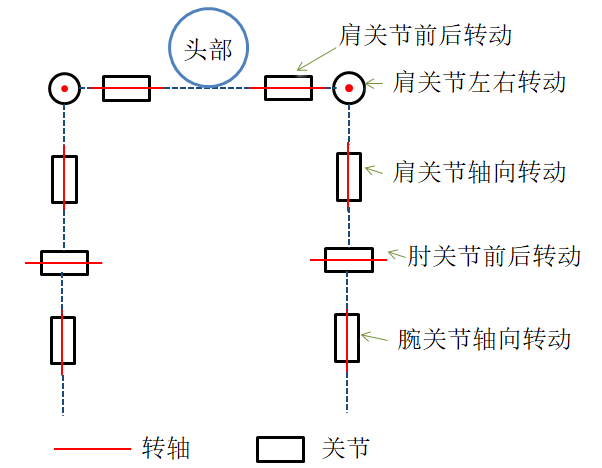
机器人模型其他关节的定义
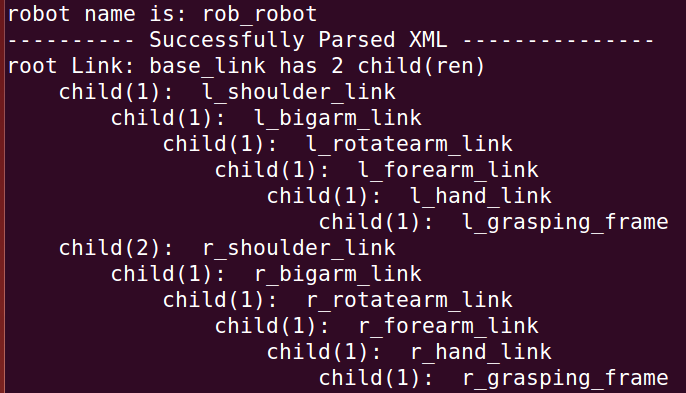
机器人的ROS模型建立
MoveIt的快速安装方法
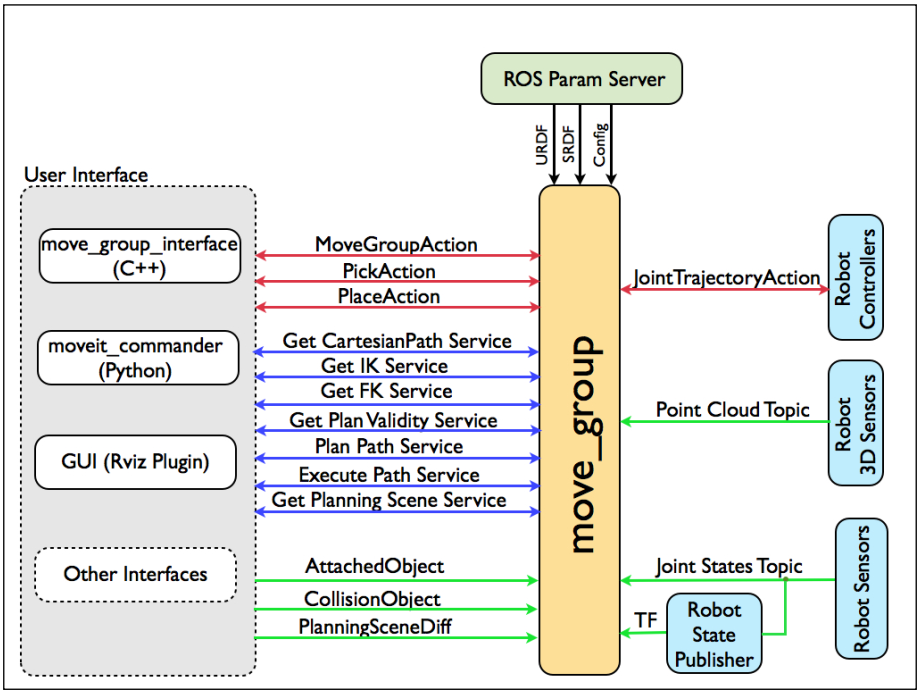
ROS系统的MoveIt模块介绍
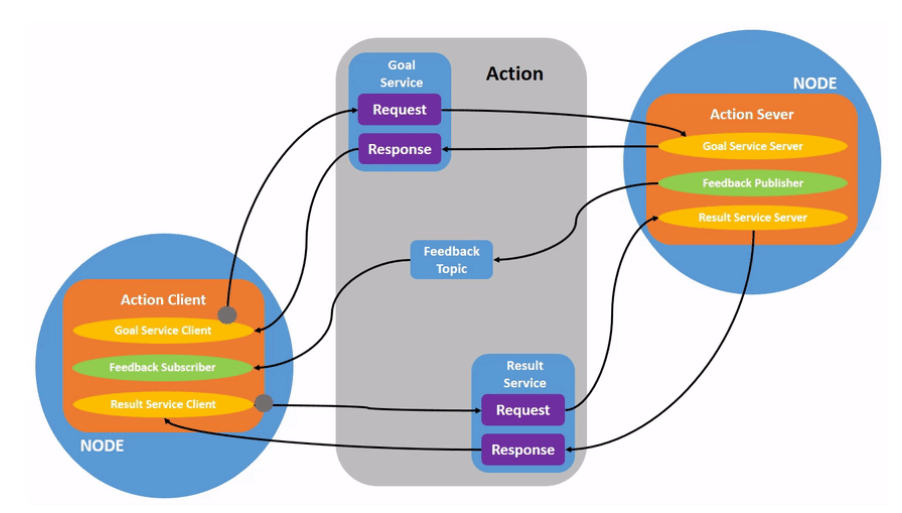
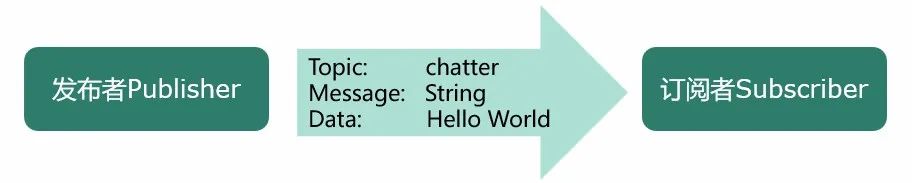
机器人通信模型有哪些
机器人零拷贝数据传输编程开发
分布式网络分组和通信

ros1和ros2的通信模型
ros的基本概念是什么
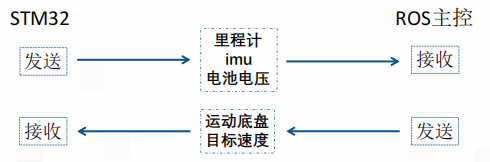
ROS主控读取stm32发送的数据
智能车ROS与STM32串口通信代码

ROS主控与STM32的硬件连接和软件连接
智能车控制器功能有哪些

ROS编写参数配置文件示例程序
ROS Motion Planning运动规划库如何安装相关依赖

 下载APP
下载APP
 搜索内容
搜索内容
