
资料下载


赫伯特机器人虚拟宠物开源分享
岳臻俊
分享资料个
描述
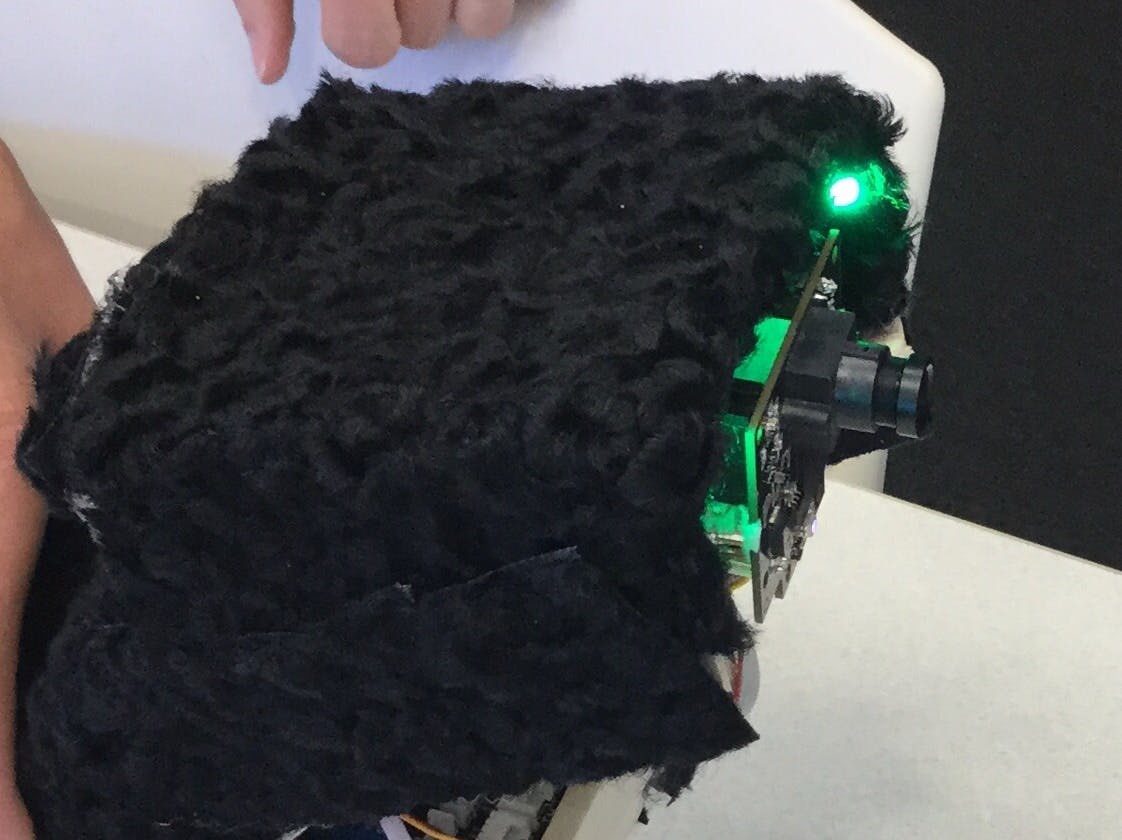
赫伯特是一个机器人虚拟宠物。一个伴侣,让您享受真正的狗的乐趣而不会乱七八糟。他会追逐某些颜色的物体,并根据你与他的互动来改变他的情绪。赫伯特的情绪和能量水平可以根据他的眼睛来判断。眼睛越亮,能量越多。颜色决定了他现在的心情。红疯;紫色-快乐;蓝色-冷漠;绿色兴奋;黄恼火。
底盘:
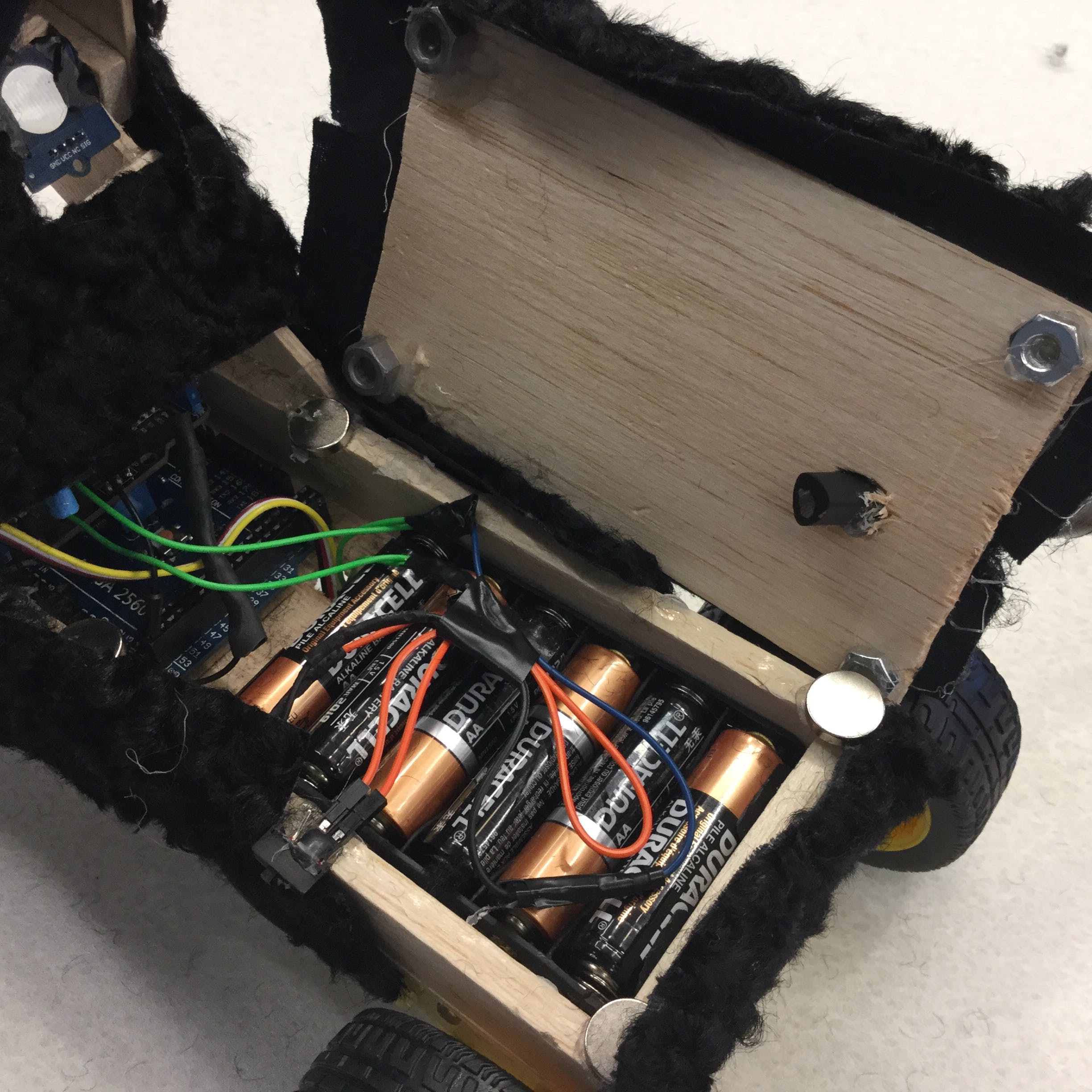
我们用薄薄的轻木制成了底盘。一条长条足以容纳一个 Arduino mega 和一个电池组。它有一英寸高的边来固定组件。底盘实际上可以是任何东西,只要它有空间和位置来放置灯光/眼睛和一个小精灵。警告!除非电路板受到保护,否则不要将金属用作底盘。我们制作了可拆卸的背面,因此您可以使用磁铁和垫圈接触硬件。你会想要穿上毛皮,但如果你确实要留一个地方放取按钮,还有一个地方放触摸传感器/抚摸点。使用热胶或木胶将轻木放在一起,让您的数字宠物追逐!
硬件:
在将Pixy 设置为与 Arduino 一起使用后,请务必定义您想要的“食物”对象和“球”对象。目前 'food' 是块数组的第 0 个索引对象,第 1 个索引是球。这可以在下面列出的代码中轻松更改。
我们使用 Grove shield 连接触摸传感器、按钮和电机驱动器。触摸传感器用于抚摸我们的狗,我们的按钮允许我们控制狗何时尝试取球。Grove 电机驱动器直接连接到 Grove shield 上的 I2C 端口。
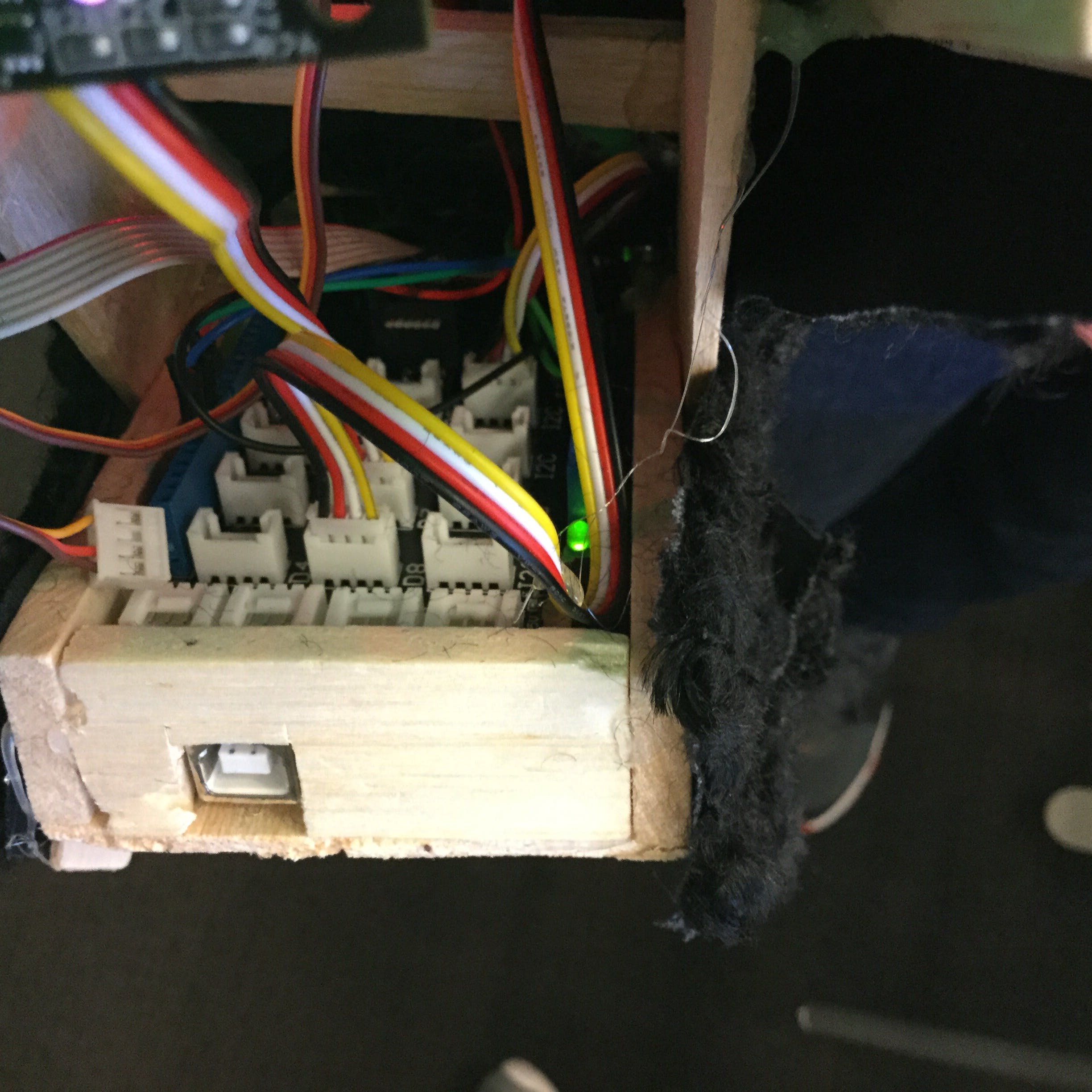
我们的小精灵相机连接到 Grove shield 上的 icsp 端口。LED 直接连接到 Arduino 的 GPIO 引脚。引脚参考可以在代码中找到。
特征:
我们的代码使用 LED 作为一种指示情绪的方式。红色代表生气,绿色代表快乐。它会经历很多不同的颜色来。我们使用触摸传感器来让他在生气时恢复快乐。这几乎就像你抚摸他一样。此外,当他累了时,灯光会变暗。当处于“取球模式”时,宠物也会驶向他的球所在的位置。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




