
资料下载


绘图机器人开源分享
凤毛麟角
分享资料个
描述
你的项目是关于什么的?
这个项目是关于一个可以在rangoli上画画和写字的机器人。它有两个伺服电机,由安装在 Arduino Uno 原型板上的 Atmega328p 微控制器控制。
你为什么决定去做?
制作这个机器人的原因是可以在 rangoli 上画出任何形状。rangoli 是手工绘制的。而且我不擅长制作兰戈里。所以,我决定做一个机器人。那可以为我做兰戈里。
它是如何工作的?
它有两个伺服电机,由安装在 Arduino Uno 原型板上的 Atmega328p 微控制器控制。它按照逆运动学原理工作。待绘制图像的轮廓坐标在Arduino代码中存储在一个数组中。
CAD设计
_Tsn2kiYALl.png?auto=compress%2Cformat&w=740&h=555&fit=max)
这是机器人的cad设计。在这里,我们可以看到两个电机、两个连杆和一支铅笔。第一个电机放在地上。连杆从其轴连接。第二个电机安装在该轴上。另一个连杆连接到第二个电机的轴上。链接末尾附有一支铅笔。铅笔尖是要到达的点。当两个电机都转动时,借助地上的铅笔,可以画出任何东西。
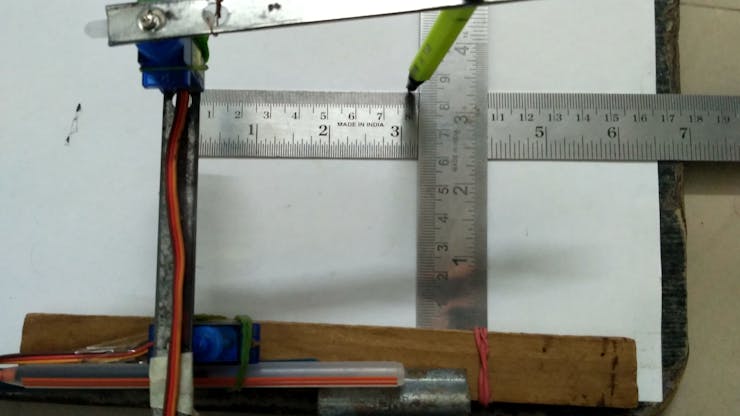
真实设计
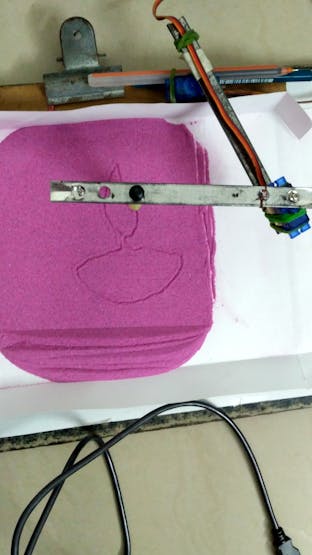
这是真正的机器人,带有 2 个电机、2 个连杆和一支笔作为要追踪的末端执行器。
工作范围
第一个马达将覆盖这个区域。但是,要达到一个特定的点。

我们需要另一个马达。这是机器人的工作范围。机器人可以到达该区域内的任何点。
我们将绘制这些图像。它们是二维或平面图像。我们将用机器人描绘它的轮廓。
图像到坐标的转换
从图像中获取坐标。我们将从该网站获得帮助。这里我们只需要上传图片即可。我们需要谁的坐标。图像将出现在下方。单击图形的边缘。将生成相应的坐标。所有坐标将显示在下方。复制它们,然后将它们存储在 Arduino 代码中的数组中。
转换问题
但是伺服电机以角度作为输入。并旋转到提供的角度。因此,我们必须将笛卡尔坐标转换为球坐标。在三角函数的帮助下。
机器人的逆运动学
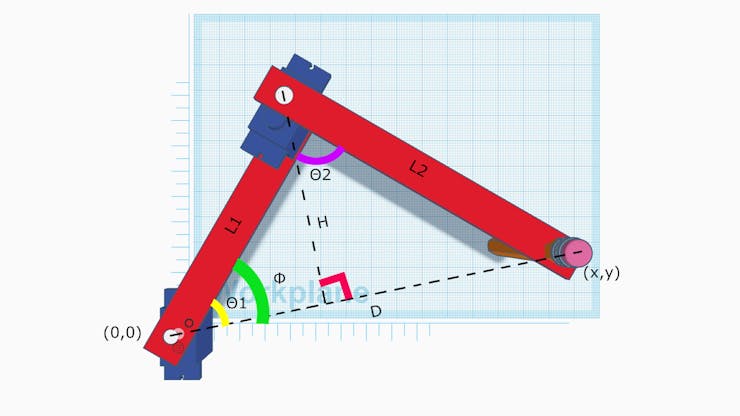
这是要达到的点。两个链接的长度相同。因此,计算点与原点的距离 D。还有高度,H。我们可以很容易地计算出所有的角度。
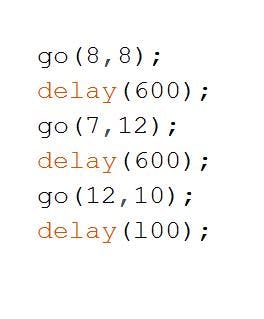
我们只需要说去 (8, 8) 或 (7, 12) 或 (12, 10)。在代码中,计算所有角度并将其发送到电机,以达到该点。
没有那么准确
准确性不是很高。由于不稳定的结构和廉价的塑料伺服系统。
采样不足

这张图不好,因为坐标采样不充分。

增加坐标数量后,质量会变好。
在兰戈里画画的原因
我们不是用笔在纸上画画。因为设置不牢固。它无法在纸张上施加足够的压力。
但是,我们成功地画了一些图。他们不是很好,但我们对结果很满意。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




