
资料下载


DIY Arduino蓝牙控制机器人
h1654155275.0032
分享资料个
第 1 步:零件
- HC-05 蓝牙模块
- 带有 USB A 到 B 电缆的 Arduino Uno
- 带有 Arduino IDE 的计算机进行编程
- 一些跳线
- 2个减速电机
- 某种电池座和电池,我使用的是 18650,它可以容纳 2、3.7 伏的 18650,提供大约 7.4 伏的电压。但您也可以使用 4xAA 电池组和 4 节 AA 电池,提供 6 伏电压。电机是 6v,所以任何一个都可以工作。
- TB6612FNG 电机驱动器
- 使用 2 个电机的机器人底盘
第 2 步:连接
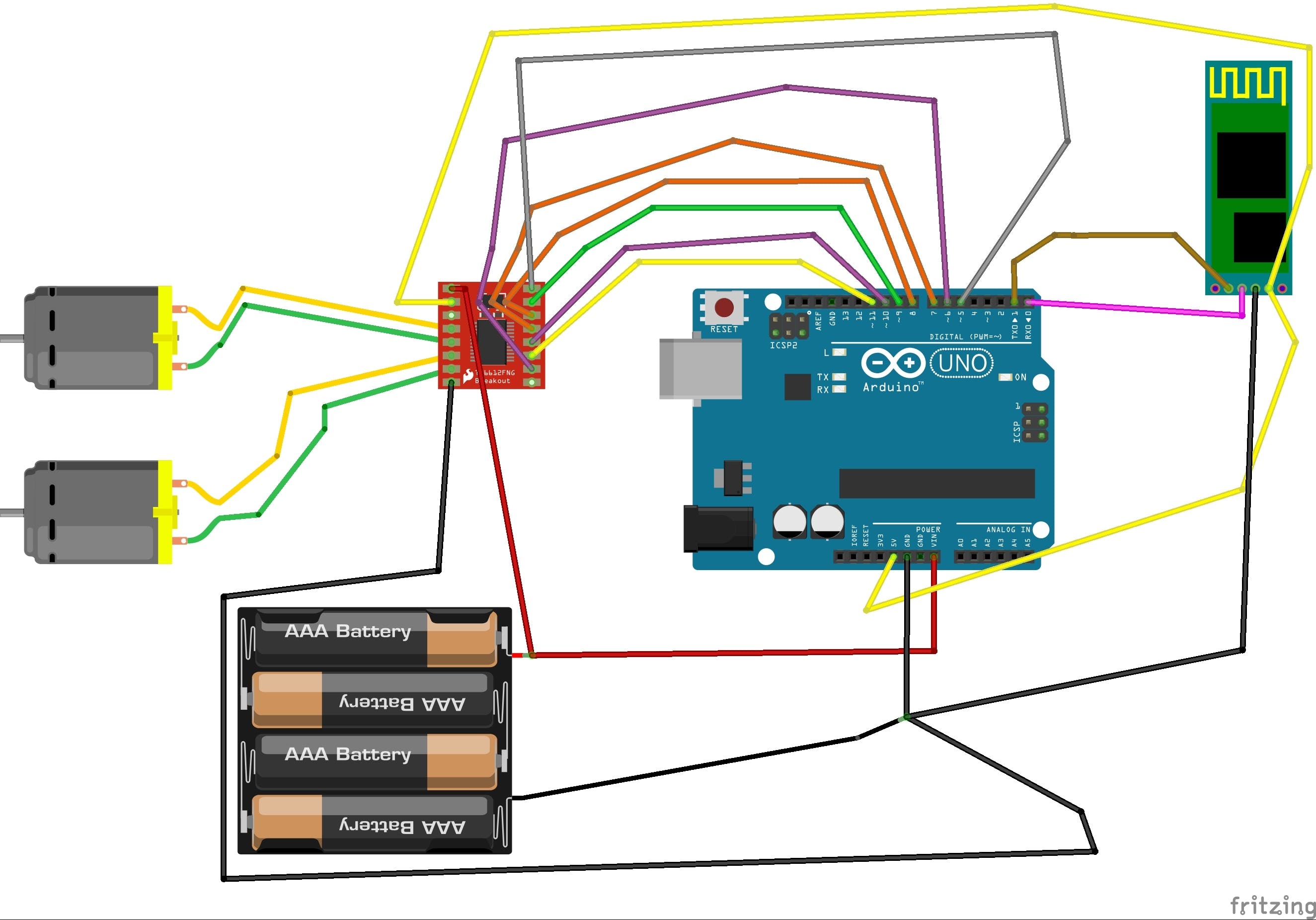
因此,是时候进行连接了,请参阅图像中的电路图。我将电机控制器输入 1a、1b、2a 和 2b 的 4 个输入引脚分别连接到 arduino 引脚 8 到 11。然后我将电机控制器的 2 个 pwm 引脚连接到 arduino 的引脚 5 和 6。然后我将电机控制器的备用引脚连接到 arduino 的引脚 7。然后我将电机线连接到 4 个输出引脚电机控制器:AO1、AO2、BO1、BO2。然后我将电池的正极连接到 arduino 的 vin 引脚和电机控制器的 vm 引脚。然后我将arduino的5v连接到电机控制器的vcc和hc-05蓝牙模块的5v。然后我将arduino的tx连接到蓝牙模块的rx,arduino的rx连接到tx的蓝牙模块。最后,我将 arduino、电机控制器、蓝牙模块和电池的接地引脚连接在一起。然后我将所有零件和电线安装在机箱内。
第 3 步:对 Arduino 进行编程

确保电池已断开并断开从 Arduino 连接到蓝牙模块的 TX 和 RX。将 Arduino 的 USB A 到 B 电缆连接到计算机,下载 Arduino IDE 和我提供的代码。打开文件并选择连接Arduino的com端口,在板子旁边,选择Arduino Uno,然后点击上传。上传后连接TX和RX。
下载 Arduino IDE:https ://www.arduino.cc/en/main/software
第 4 步:测试和使用!
现在插入电池。
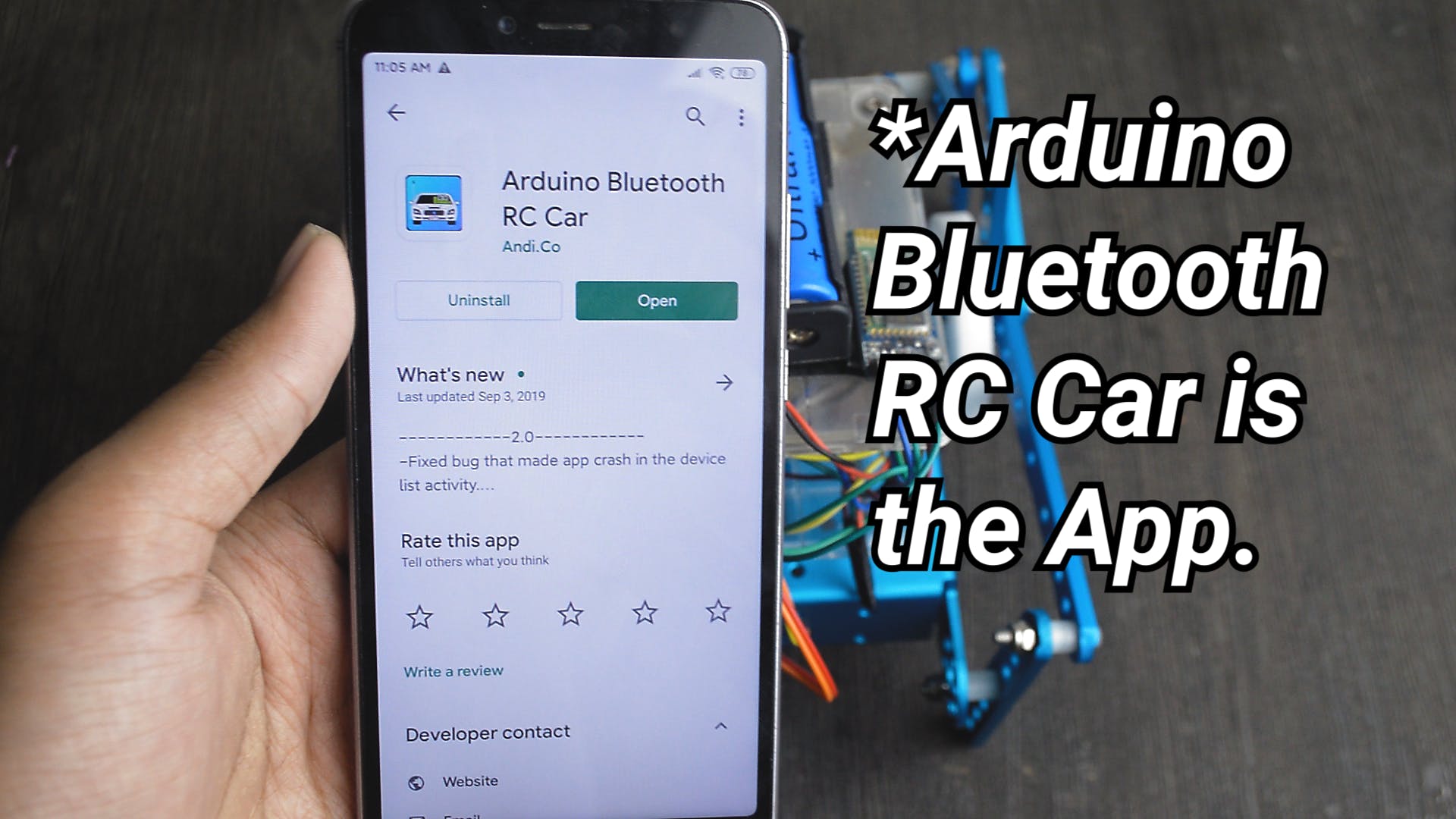
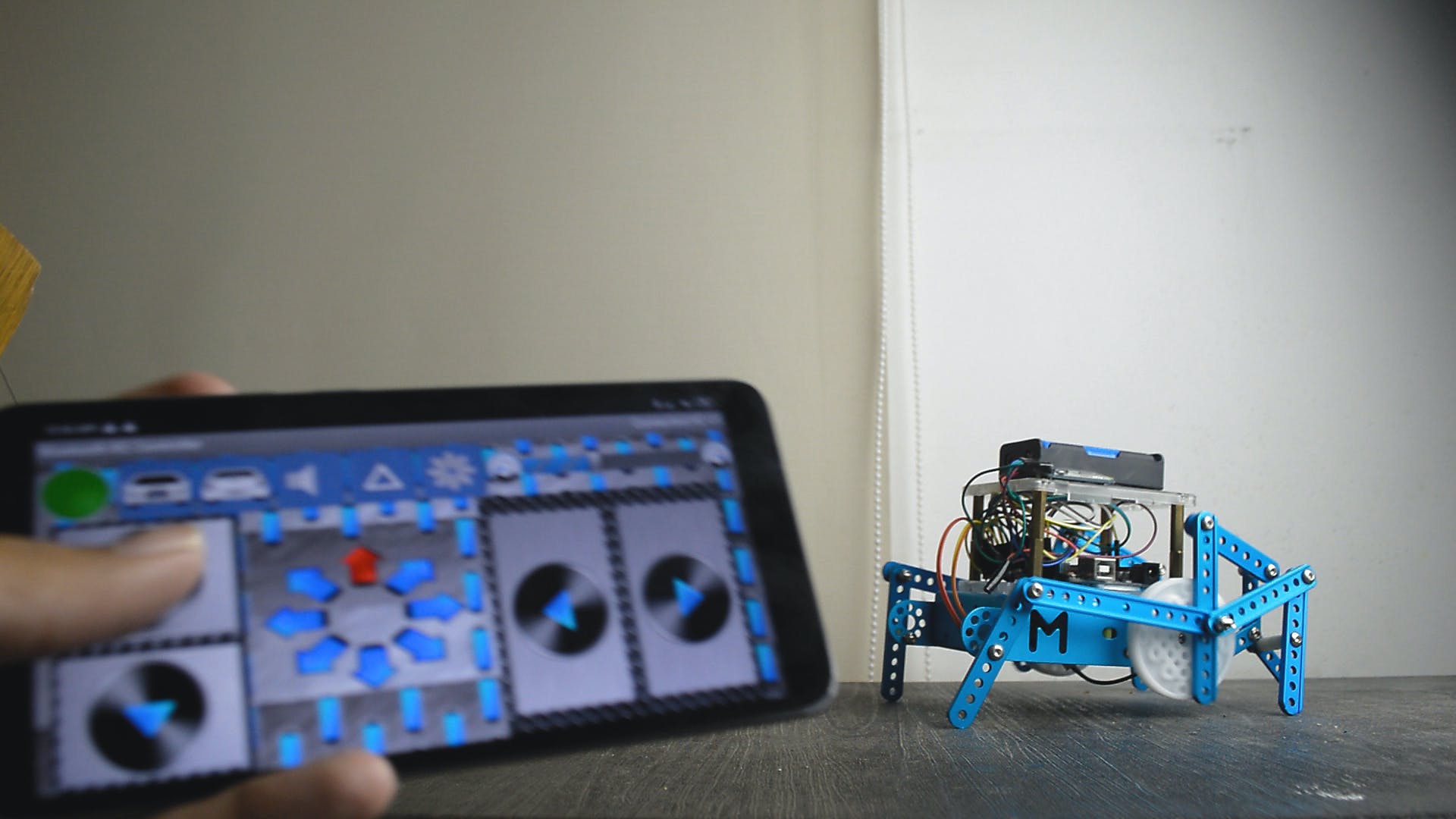
要从 Android 手机控制机器人,请在 Google Play 商店下载蓝牙遥控车应用程序。然后从设置中配对蓝牙模块。然后从应用程序连接它。按下按钮测试机器人。如果您看到控件被反转,那么您需要将电线从电机翻转到 arduino,并测试和修复控件。您可以通过应用程序中的滑块调整速度。请记住,当您第一次启动机器人时,您需要设置速度,默认为接近 0。
第5步:完成!
。再见!
我的 YouTube 频道:youtube.com/aymaanrahman05
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




