
资料下载


×
基于室内机器人导航信息的获取
消耗积分:0 |
格式:rar |
大小:0.82 MB |
2017-10-17
分享资料个
机器人导航即指引导机器人安全、准确地沿着选定的路线,准时到达目的地的一种手段。
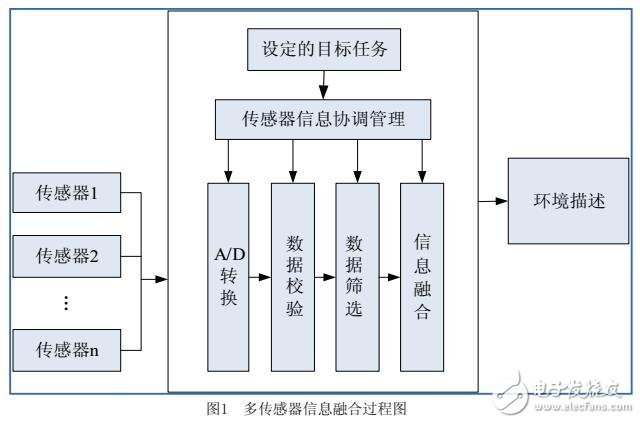
导航主要解决的问题包括: 1) 精确获取机器人在空间的位置、方向、环境信息; 2) 对获取信息进行3) 机器人安全移动的路径规划。为分析和环境建模;了实现移动机器人的地图构建、定位、路径规划等功能,导航需要利用各种传感器(如里程计、超声波、激光测距仪、视觉传感器等)检测、分析处理环境信息以实现移动机器人自主行走。
应用传感器感知的信息来实现可靠的导航是自主移动机器人最基本、最重要的功能之一,也是移动机器人实现自主移动的核心技术,是机器人研究领域的重点和难点问题。研究人员跟据所应用的传感器技术,对了机器人的导航方法进了长期、深入的研究,取得了许多理论性和应用性的成果。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




