
资料下载


基于接触时间的机器人导航环境表示方法
分享资料个
自主移动机器人导航是机器人学的基本问题,随着多年来学者不懈努力,已提出了大量自主机器人导航方法,但在未知环境中存在运动障碍物且行为不能准确预测,故动态未知环境下导航安全问题仍是自主移动机器人研究的重点。
针对导航中的安全问题,Fraichard等和Chan等分别提出了不可避免碰撞状态( Inevitable Collision States,ICS)和不可避免碰撞区域(Regions of Inevitable Collision,RIC)概念。Fraichard[31进一步研究了Neamess Diagram、Dynamic Window和Velocity Obstacle:种经典导航方法的安全性,证实三种方法都存在碰撞危险,并总结了安全导航的三条基本准则,即机器人安全导航必须考虑:机器人自身动态特性,环境中障碍物运动行为,以及导航规划受到时间限制。
接触时间又被称为碰撞时间( Time to Contact,TTC),是指在机器人与障碍物相对速度保持不变的情况下,机器人与障碍物发生碰撞的最短时间,是评价碰撞危险的通用量度。计算机器人与障碍物的接触时间需要考虑机器人自身的动态特性和环堍中障碍物的运动特性,并且接触时间自身是机器人导航的安全时间限制,故将接触时间应用于导航方法中,可以同时满足Fraichard提出的安全三条基本准则。
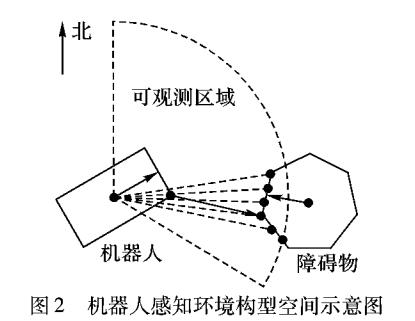
基于此种思想,本文提出一种利用接触时间表示导航环境的方法,即接触时间空间表示法。将导航过程的构型空间(Configuration Space)映射为接触时间空间,接触时间空间可以直观观察导航的时间约束。以经典行为动力学导航方法作为仿真导航方法,为保证能够应用接触时间空间,对行为动力学导航方法进行改进。对比仿真证实引入接触时间空间可以提高行为动力学导航方法的安全性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





