
资料下载


×
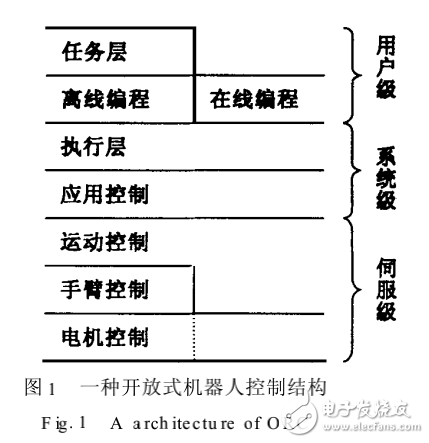
开放式机器人控制结构及其控制器综述
消耗积分:0 |
格式:rar |
大小:0.3 MB |
2017-10-18
分享资料个
本文对开放式机器人控制器的研究进行了概括和总结o综合叙述了开放式机器人控制器的思想及优点从控制结构!硬件和软件实现的角度总结了已有的研究工作o指出了开放式机器人控制器的发展方向。
开放式机器人控制结构
机器人系统是一个复杂系统o处理复杂性的方法是定义一种控制结构o把复杂系统分解成若干个可处理的部分o每个部分对外部行为给出一个简单的接口o忽略或在某种程度上简化内部行为≈x q这方面的研究工作都集中于定义一个与实现平台无关的抽象模型提出的模型包括七层}执行机构传感器!传感器处理!环境建模!任务分解!数值判断和全局内存Ù通 讯q每一层的反馈都是闭环的教授提出了基于分层递阶控制结构的智能机器结构≈t| q该结构由组织层!协调层和执行层三个基本层组成q组织层使用神经网络进行推理决策规划o而用机组织执行命令所需的动作和规则q协调层使用 °网设置通讯协议q控制系统智能的分布基于一种提高精度降低智能的原则q熵函数被用作传感器集成的控制函用了嵌套式分级层次0结构o该方法在计算能力有限的情况下比较有效。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






