
资料下载


×
基于DSP的NNC-PID控制器电液位置系统
消耗积分:1 |
格式:rar |
大小:0.3 MB |
2017-11-01
分享资料个
在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置伺服系统具有功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服跟踪性能,因此是控制领域中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。
常规PID控制器具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部最小点,不易达到最优控制。
将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用DSP实现NNC-PID控制器对电液位置系统进行智能控制,满足电液位置伺服对控制系统响应快和高精度的要求。
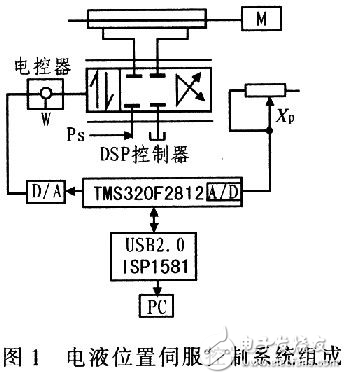
1 电液位置伺服系统构成
以喷漆机械手第一关节为对象,构造了研究实验装置,如图1所示。其中反馈器件采用精密导电塑料电位计。整个控制系统以DSP为核心、由喷漆机械手第一关节、位置传感器、12位A/D转换器和D/A转换器、信号调理电路和输出放大驱动电路以及上位机PC等组成,实现定位和伺服跟踪控制。
2 控制系统硬件设计
TMS320F2812是TI公司推出的2000系列的数字信号处理(DSP),主要应用在控制领域。频率达150 MHz,定点32位的CPU,可运行16×16和32×32的运算。片上高达128 KB的程序存储器,128 KB的ROM和18 KB的SARAM,外部接口16位数据线和19位地址线,可外扩l MB的ROM。此外还集成有16通道的12位的A/D转换器,最小化周期80 ns,以及56个可单独编程的通用I/0(GPIO)引脚。高速的数字信号处理能力及丰富的外扩资源使TMS320F2812适合应用在要求较高的控制系统。
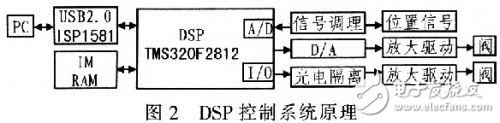
2.1 控制系统总体结构
控制系统采用了PC+DSP的控制方案,系统总体结构如图2所示。其中PC机主要用来显示控制界面,调节各控制参数,实时显示各相关信号。而DSP则完成低层的控制功能,通过A/D转换器采集各路信号,经过一定的算法处理后,由D/A口输出,以及通过I/0口、光电隔离驱动放大电路来控制各电磁阀的开关。同时通过通信,向PC机发送采集来的信号,并接收PC机的起动、停止等指令以及各控制参数。
常规PID控制器具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部最小点,不易达到最优控制。
将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用DSP实现NNC-PID控制器对电液位置系统进行智能控制,满足电液位置伺服对控制系统响应快和高精度的要求。
1 电液位置伺服系统构成
以喷漆机械手第一关节为对象,构造了研究实验装置,如图1所示。其中反馈器件采用精密导电塑料电位计。整个控制系统以DSP为核心、由喷漆机械手第一关节、位置传感器、12位A/D转换器和D/A转换器、信号调理电路和输出放大驱动电路以及上位机PC等组成,实现定位和伺服跟踪控制。
2 控制系统硬件设计
TMS320F2812是TI公司推出的2000系列的数字信号处理(DSP),主要应用在控制领域。频率达150 MHz,定点32位的CPU,可运行16×16和32×32的运算。片上高达128 KB的程序存储器,128 KB的ROM和18 KB的SARAM,外部接口16位数据线和19位地址线,可外扩l MB的ROM。此外还集成有16通道的12位的A/D转换器,最小化周期80 ns,以及56个可单独编程的通用I/0(GPIO)引脚。高速的数字信号处理能力及丰富的外扩资源使TMS320F2812适合应用在要求较高的控制系统。
2.1 控制系统总体结构
控制系统采用了PC+DSP的控制方案,系统总体结构如图2所示。其中PC机主要用来显示控制界面,调节各控制参数,实时显示各相关信号。而DSP则完成低层的控制功能,通过A/D转换器采集各路信号,经过一定的算法处理后,由D/A口输出,以及通过I/0口、光电隔离驱动放大电路来控制各电磁阀的开关。同时通过通信,向PC机发送采集来的信号,并接收PC机的起动、停止等指令以及各控制参数。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



