
资料下载


×
基于时延Q学习的机器人动态规划方法
消耗积分:1 |
格式:rar |
大小:0.48 MB |
2017-11-28
分享资料个
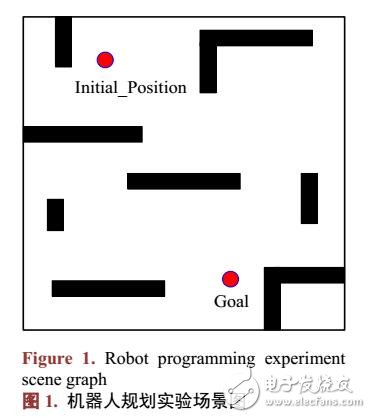
机器人动态规划是指在某一个给定的运行空间中,移动机器人通过路径的动态规划来获得一条从初始位置到目标位置的最优路径。环境未知的情况下的机器人路径规划是该领域的研究难点。解决路径规划的主要研究方法包含全局规划法和局部规划方法,全局规划方法主要包括:神经网络和人工势场的方法、遗传算法和粒子群算法等。而局部规划算法主要包括含滚动路径规划和在线视点寻求方法等。全局规划方法主要解决环境己知的问题,在获取了先验知识后才进行规划,其优点是易于收敛;而局部规划法可以用于解决环境未知或部分可观察的问题,但是其难以收敛,且易于陷入局部最优。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



