
资料下载


×
一种光电传感和路径记忆的智能车导航系统的设计实现
消耗积分:1 |
格式:rar |
大小:0.5 MB |
2017-11-29
分享资料个
智能车的诞生为人类提供了一种全新的缓解城市交通拥堵、提高车辆安全性的交通工具。在众多的智能车导航方案中,视觉导航由于与人类的驾驶方式最为接近,成为智能车研究热点之一。目前,视觉导航方法在高速公路环境中已经获得了初步成功,这类环境结构化程度较高,道路曲率有限、路况相对简单。然而,随着城市环境智能车研究的兴起,视觉导航面临了新的挑战。城市环境中的道路不仅种类多,而且转弯半径大,常常会因视野有限而导致道路跟踪失败。本文将从该智能车总体方案、路径识别方案选择、转向和驱动控制及路径记忆算法等方面进行介绍。
智能车总体方案
智能车系统以飞思卡尔公司的MC68S912DP256为核心,由电源模块、传感器模块、直流电机驱动模块、转向电机控制模块、控制参数选择模块、单片机 模块等组成,如图1所示。智能车系统工作电压由+1.6V、+5V、7.2V三个系统混合组成,其中7.2V用于给驱动电机和转向舵机供电,5V给车速传 感器、MCU以及光电传感器接收管供电,1.6V给发光管供电。为了在线控制参数的调整方便,还设置了一个控制参数选择模块,可以通过几个按键的设置,调 用不同的程序或控制参数,以适应不同场地条件的要求。
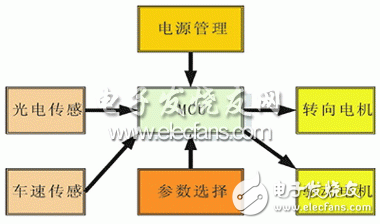
图1 智能车总体结构
智能车的工作模式是:光电传感器探测赛道信息,转速传感器检测当前车速,电池电压监测电路检测电池电压,并将这些信息输入单片机进行处理。通过控制算法对赛车发出控制命令,通过转向舵机和驱动电机对赛车的运动轨迹和速度进行实时控制。
路径识别方案选择与电路设计
路径识别方案是首先需要确定的,主要有以下几个问题。
*光电识别还是摄像头识别;
*传感器如何排列?间隔多大、形状如何、单排还是双排;
*传感器可向前探测的远度;
*传感器信号采用数字式还是模拟式;
*电路上如何实现。
由于光电识别方案简单可靠,因此本文采用了光电识别方案。
数字式光电识别与模拟式光电识别
光电式传感器是以光电器件作为转换元件的传感器。它可用于检测直接引起光量变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等。光电式传感器具有非接触、响应快、性能可靠等特点,因此在工业自动化装置和机器人中获得广泛应用。近年来,新的光电器件不断涌现,特别是CCD图像传感器的诞生,为光电传感器的进一步应用开创了新的一页。
模拟式光电传感器从理论上可以大大提高路径探测精度。模拟式光电传感器的发光和接收都是锥角一定的圆锥形空间,其电压大小与传感器距离黑色路径标记线的水 平距离有定量关系:离黑线越近,电压越低,离黑线越远,则电压越高(具体的对应关系与光电管型号以及离地高度有关),如图2所示。
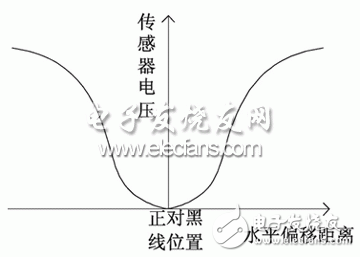
图2 传感器电压与偏移距离关系示意图
因此,只要掌握了传感器电压-偏移距离特性关系,就可以根据传感器电压大小确定各传感器与黑色标记线的距离(而不是仅仅粗略判断该传感器是否在线上),进而获得车身纵轴线相对路径标记线的位置,得到连续分布的路径信息。
根据实车试验,可以将路径探测的精度提高到1mm.这样传感器采集的信息就能保证了单片机可以获得精确的赛道信息,从而为提高赛车的精确控制提供了保证。
双排排列与前瞻设计
本文开发了智能车性能仿真平台[2],对传感器的布局进行了深入研究[3]。由于转向舵机、电机和车都是高阶惯性延迟环节,从输入到输出需要一定的时间, 越早知道前方道路的信息,就越能减小从输入到输出的滞后。检测车前方一定距离的赛道就叫前瞻,在一定的前瞻范围内,前瞻越大的传感器方案,其极限速度就会 越高,其高速行驶过程中对引导线的跟随精度也相对较高,系统的整体响应性能较好。因此路径识别模块设计成抬起与地面形成一个夹角,前排传感器用于前瞻,后 排传感器对赛道始点进行识别、计算车身纵轴线与赛道中心线的偏差斜率,以利于更好地调整车辆的姿态。
智能车总体方案
智能车系统以飞思卡尔公司的MC68S912DP256为核心,由电源模块、传感器模块、直流电机驱动模块、转向电机控制模块、控制参数选择模块、单片机 模块等组成,如图1所示。智能车系统工作电压由+1.6V、+5V、7.2V三个系统混合组成,其中7.2V用于给驱动电机和转向舵机供电,5V给车速传 感器、MCU以及光电传感器接收管供电,1.6V给发光管供电。为了在线控制参数的调整方便,还设置了一个控制参数选择模块,可以通过几个按键的设置,调 用不同的程序或控制参数,以适应不同场地条件的要求。
图1 智能车总体结构
智能车的工作模式是:光电传感器探测赛道信息,转速传感器检测当前车速,电池电压监测电路检测电池电压,并将这些信息输入单片机进行处理。通过控制算法对赛车发出控制命令,通过转向舵机和驱动电机对赛车的运动轨迹和速度进行实时控制。
路径识别方案选择与电路设计
路径识别方案是首先需要确定的,主要有以下几个问题。
*光电识别还是摄像头识别;
*传感器如何排列?间隔多大、形状如何、单排还是双排;
*传感器可向前探测的远度;
*传感器信号采用数字式还是模拟式;
*电路上如何实现。
由于光电识别方案简单可靠,因此本文采用了光电识别方案。
数字式光电识别与模拟式光电识别
光电式传感器是以光电器件作为转换元件的传感器。它可用于检测直接引起光量变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等。光电式传感器具有非接触、响应快、性能可靠等特点,因此在工业自动化装置和机器人中获得广泛应用。近年来,新的光电器件不断涌现,特别是CCD图像传感器的诞生,为光电传感器的进一步应用开创了新的一页。
模拟式光电传感器从理论上可以大大提高路径探测精度。模拟式光电传感器的发光和接收都是锥角一定的圆锥形空间,其电压大小与传感器距离黑色路径标记线的水 平距离有定量关系:离黑线越近,电压越低,离黑线越远,则电压越高(具体的对应关系与光电管型号以及离地高度有关),如图2所示。
图2 传感器电压与偏移距离关系示意图
因此,只要掌握了传感器电压-偏移距离特性关系,就可以根据传感器电压大小确定各传感器与黑色标记线的距离(而不是仅仅粗略判断该传感器是否在线上),进而获得车身纵轴线相对路径标记线的位置,得到连续分布的路径信息。
根据实车试验,可以将路径探测的精度提高到1mm.这样传感器采集的信息就能保证了单片机可以获得精确的赛道信息,从而为提高赛车的精确控制提供了保证。
双排排列与前瞻设计
本文开发了智能车性能仿真平台[2],对传感器的布局进行了深入研究[3]。由于转向舵机、电机和车都是高阶惯性延迟环节,从输入到输出需要一定的时间, 越早知道前方道路的信息,就越能减小从输入到输出的滞后。检测车前方一定距离的赛道就叫前瞻,在一定的前瞻范围内,前瞻越大的传感器方案,其极限速度就会 越高,其高速行驶过程中对引导线的跟随精度也相对较高,系统的整体响应性能较好。因此路径识别模块设计成抬起与地面形成一个夹角,前排传感器用于前瞻,后 排传感器对赛道始点进行识别、计算车身纵轴线与赛道中心线的偏差斜率,以利于更好地调整车辆的姿态。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





