
资料下载


×
基于局部Voronoi图的启发式反监控路径发现算法
消耗积分:1 |
格式:rar |
大小:0.71 MB |
2018-01-18
分享资料个
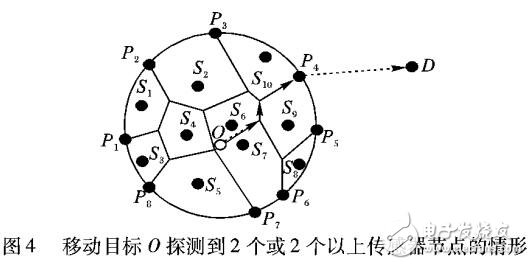
针对移动对象通过传感区域时的安全问题,提出了一种基于局部Voronoi图(VT)的启发式反监控路径发现算法。首先,给出了一种基于局部Voronoi图的路径暴露风险近似估算模型。在该模型中,移动目标可依据当前探测到的传感器节点位置信息动态生成局部Voronoi图,并可依据定义的暴露风险计算公式近似估算出局部Voronoi图中各条边所对应路径的暴露风险。然后,在此基础上设计并实现了一种启发式的反监控路径发现算法。在该算法中,移动目标可首先基于局部Voronoi图确定自己的下一跳位置点候选集,然后再基于定义的启发式代价函数从候选集中选择一个风险代价最小的位置点作为其下一跳目标位置点。最后,沿着局部Voronoi图中对应的最小暴露风险路径移动到该目标位置点。理论分析和实验结果表明,所提算法具有良好的反监控性能,针对部署有凡个传感器节点的区域,能够使得移动对象在不超过O(n log n)的时间内快速找到一条具有较低暴露风险的路径来穿越整个传感区域。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



下载排行榜
- 暂无相关数据

