
资料下载


×
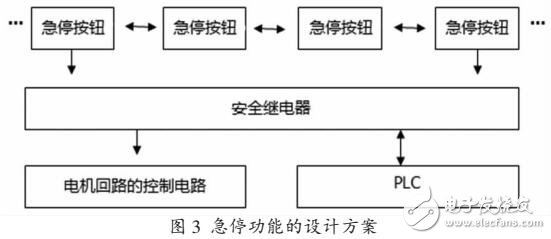
盾构机电液控制系统的急停功能设计
消耗积分:3 |
格式:rar |
大小:0.19 MB |
2018-01-19
分享资料个
为了更好地提高隧道掘进效率,缓解国内交通运输的问题,国内各大城市纷纷引进高效的全断面掘进机,也称盾构机。其中电液控制系统是盾构机自动化的关键组成部分,承担着控制盾构机完成各项动作的艰巨任务。整个盾构机由几百个甚至上千个电气液压部件组成。在地面掘进的过程中,所有部件根据盾构机的位置以及掘进过程执行相应的动作,从而保证了盾构机挖掘工作的正常运行。
然而,随着自动化程度越来越高,施工要求越来越大,再加上其恶劣工作环境环境、磁场强度高、空气湿度大、粉尘含量高,以及机器重复使用次数多等特点,会对现有的盾构机电液控制系统的软硬件运行造成干扰,可能导致盾构机的误动作,导致盾构机挖掘过程中的安全事故。盾构机在正常运行时,无论盾构机上面的电液部件在执行什么动作,一旦出现紧急情况,都要求整个盾构机所有电液部件立即停止动作,防止发生意外事故。这就要求盾构机的电液控制系统具有控制整个盾构机所有部件立即停止动作的功能。然而,目前国内外的盾构机的急停控制系统各不相同。鉴此,本文提出了一种盾构机在工作中出现紧急情况时使用的急停控制方案,即在盾构机工作中出现紧急情况时,操作急停按钮使整个盾构机上面的电液部件都立即停正动作,并不再响应任何后续操作指令。在危险情况排除后,复原急停按钮,对系统复位之后就可以使盾构机恢复正常工作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





