
资料下载


×
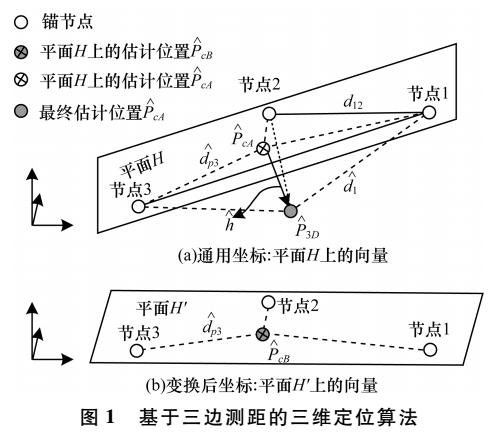
基于线性最小二乘估计的传感网节点三维测距定位算法
消耗积分:2 |
格式:rar |
大小:1.10 MB |
2018-03-12
分享资料个
三维节点定位问题主要应用于医疗保健、安防及紧急控制等系统。精确的三维节点定位有助于无人系统的发展,无人系统能够通过无线传感器网络( Wireless Sensor Network, WSN)检测和共享自身信息。定位系统即全球定位系统( Global Positioning System,GPS)在室外环境表现出了良好的性能。然而,用于室内、水下及隧道环境中的节点会干扰GPS信号进行定位,因为此环境下运用了小型装置进行低成本定位。尽管大多数定位算法提供了比较精确的位置估计。并解决了几何问题,但是很多算法仅集中在二维分析上。
针对传统无线传感器网络节点三维定位算法会产生奇异矩阵及复杂度较高的问题,提出一种新的基于三边测量距离的定位算法,实现无线WSN中节点的三维定位。通过四面体体积公式计算得出偏移向量,运用平面上向量旋转的二维线性最小二乘估计变换的目标位置,由变换的目标位置及偏移向量计算得出目标位置。仿真实验结果表明,与传统的三维LM定位算法相比,改进算法精确性提高约10%且没有出现奇异矩阵,计算复杂度更低。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




下载排行榜
- 暂无相关数据

