
资料下载


如何使用uCOS-III进行教育机器人系统设计概述
分享资料个
为了保障教育机器人的多功能的实现及其系统的稳定运行,设计了一种基于实时操作系统uCOS-III的教育机器人系统。系统基于Cortex-M3内核的微控制器STM32F103VET6硬件平台,采用uCOS-III系统实现教育机器人与串口屏的数据通信,实现了教育机器人文件系统、电机实时控制、传感器数据测量和显示等功能。文章详细介绍了系统的总体构成,以及软硬件实现方法;实验表明,采用uCOS-III对教育机器人系统进行多任务管理,增强了系统的稳定性,提高了系统的实时性。

随着人们对机器人技术智能化本质知识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透。结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器,教育机器人的出现集成了当代科技发展的众多成果,是培养跨学科、创新性人才的有效手段。目前,机器人教育对初、高中学生的认知发展作用越来越明显。为了更好的满足初、高中学生的教学需求,本文的教育机器人针对初、高中学生的思维特征研发。从市场规模看,中国具有世界上最大规模的在校人口,我国教育事业对教育机器人的需求将形成一个巨大的市场,发展教育机器人产业具有广阔的市场前景。
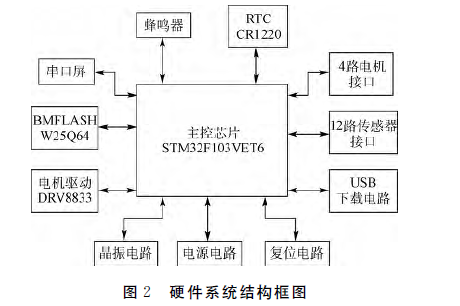
教育机器人一般由控制器、机械结构和上位机编程软件3部分组成,本设计的教育机器人系统是基于控制器设计的。控制器的外形如图1所示。控制器能够下载上位机编程软件的执行程序,并对连接控制器的传感器和电机进行控制,能够实现教育机器人循迹避障、熄灭火源、测量环境参数和起重运输物品等功能。本设计在软件上采用uCOS-III实时操作系统和串口屏进行人机交互界面开发,实现了教育机器人文件系统、传感器数据测量和显示、电机实时控制等。硬件上采用性能优越的STM32芯片,提高了系统整体性能和可靠性。串口屏由于其简单的通讯接口和友好的多功能触摸界面的集成化设计,简化了系统的软件设计和硬件设计,大大节约了成本。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




