搜索内容
登录
倒立摆
0人关注
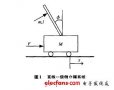
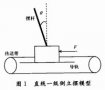
倒立摆,Inverted Pendulum ,是典型的多变量、高阶次 ,非线性、强耦合、自然不稳定系统。倒立摆系统的稳定控制是控制理论中的典型问题 ,在倒立摆的控制过程中能有效反映控制理论中的许多关键问题 ,如非线性问题、鲁棒性问题、随动问题、镇定、跟踪问题等。
...展开
6
文章
0
视频
5
帖子
18559
阅读
关注标签,获取最新内容
全部
技术
资讯
资料
帖子
嵌入式组合控制直线一级倒立摆系统
2012-04-23
6859阅读
基于变速积分的PID一级倒立摆研究
2012-02-03
1000阅读
二级倒立摆系统的实时稳定控制实验研究
2012-01-18
1068阅读
倒立摆与自动控制原理实验
2012-01-18
1804阅读
倒立摆系统的自摆起和稳定控制
2012-01-18
1491阅读
智能控制在倒立摆控制系统中的应用
2011-07-06
1730阅读
直线柔性连接两级倒立摆控制器设计
2011-07-06
754阅读
基于分层递阶智能控制的倒立摆研究
2011-07-06
899阅读
环形单级倒立摆起摆控制研究
2011-07-06
1081阅读
倒立摆实验系统与最优控制算法
2011-07-06
726阅读
倒立摆和自动控制技术
2011-07-06
697阅读
倒立摆的非线性稳定控制实现
2011-07-06
804阅读
基于视觉伺服的倒立摆实验平台的研究
2011-06-28
793阅读
单级倒立摆控制系统的稳定性算法设计
2011-03-31
8856阅读
简述倒立摆控制系统
2010-08-05
1758阅读
倒立摆的模糊控制研究
2010-12-29
650阅读
基于状态反馈控制的倒立摆系统分析和设计
2010-12-17
863阅读
基于DSP实现的一阶倒立摆控制
2010-08-05
878阅读
二级倒立摆的半物理仿真模型研究与实现
2009-07-31
819阅读
基于C++ Builder实现的倒立摆控制系统
2009-06-15
633阅读
上一页
2
/
2
下一页
相关推荐
更多 >
IOT
海思
STM32F103C8T6
数字隔离
硬件工程师
wifi模块
MPU6050
Protues
STC12C5A60S2
74ls74
UHD
×
20
完善资料,
赚取积分












 下载APP
下载APP
 搜索内容
搜索内容
