
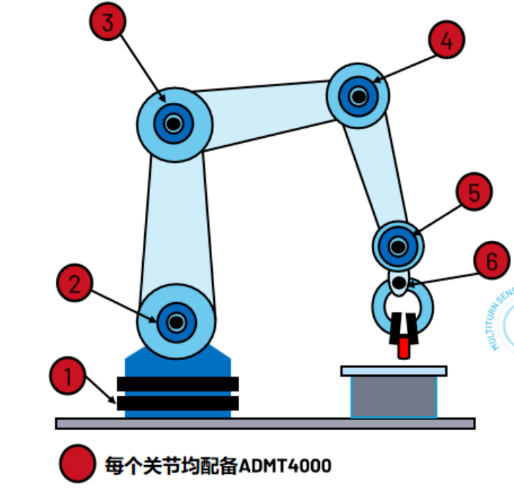
ADI ADMT4000磁性位置传感器助力人形机器人关节设计

伺服电机中的回原点方式
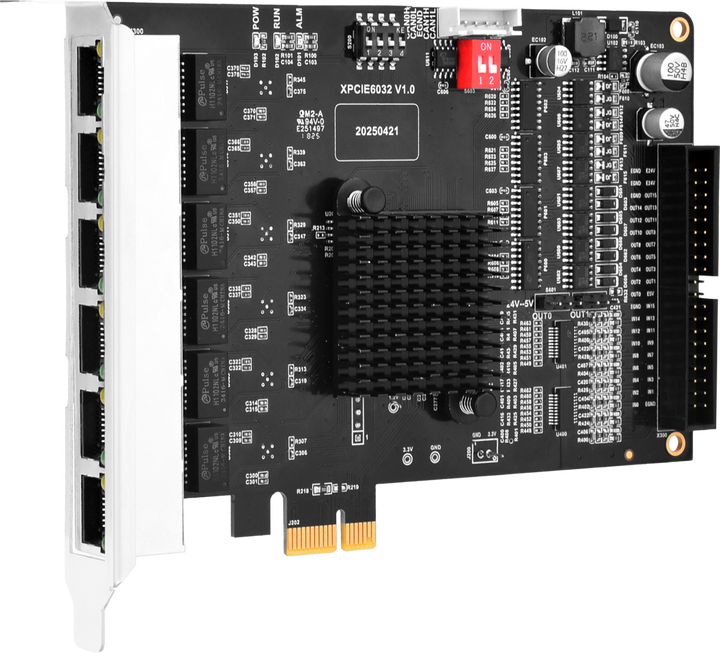
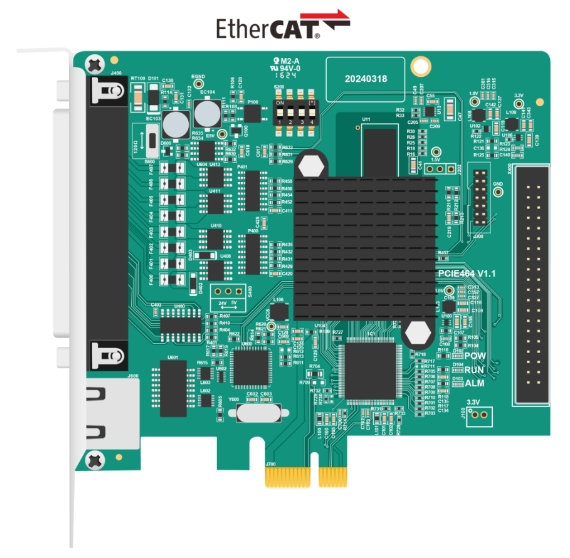
全球首创!PCIe超实时6通道EtherCAT运动控制卡上市!
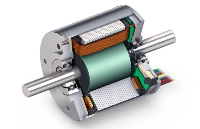
浮思特 | 无刷电机与有刷直流电机的区别是什么,该如何选择?

一个FOR循环完成多个伺服轴的实例化方法
飞创XYZ龙门直线模组:工业自动化的精密动力

解锁多轴直线电机模组的高效搭接方法

纳芯微磁传感器技术推动人形机器人性能提升

运动控制轴和单轴控制区别怎么选?工业自动化工程师一文讲透!
控制系统调优必备知识:“运动控制卡 控制周期怎么算”你真的懂了吗?
使用瑞萨电子RZ/T2H产品实现多关节机器人
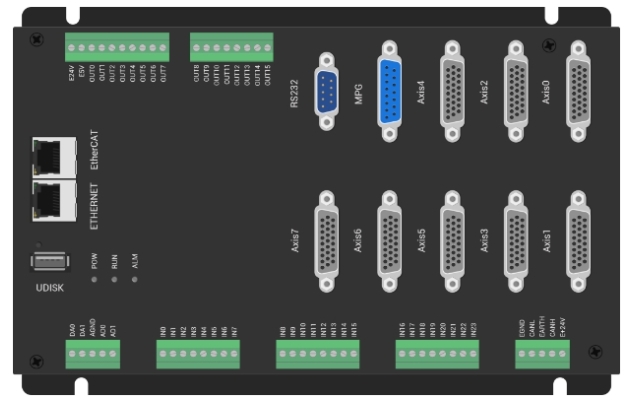
PCIe EtherCAT实时运动控制卡PCIE464的CAD导图与刀向跟随应用

江苏润石RS8417/RS8418系列运算放大器介绍
LabVIEW运动控制(三):EtherCAT运动控制器的高效加工指令自定义封装
LabVIEW运动控制(二):EtherCAT运动控制器的多轴示教加工应用(中)

半导体设备中用的什么导轨 如何选型

江苏润石RS844x系列运算放大器介绍
XYZ三轴直线模组的核心优势与应用

手把手带你入门AWStudio运动控制编程

微型导轨在半导体设备中如何防止磨损?

 下载APP
下载APP
 搜索内容
搜索内容
