
资料下载


移动机器人的构建
王凯
分享资料个
描述
什么为什么?
我一直想建立自己版本的移动机器人平台。
Makibot 现在正在开发此应用程序。基本概念是创建一个移动机器人,可以移动到周围环境,使用标记找到特定对象,获取对象并转移到指定位置。想象一下,数百个机器人同时工作以对在线订单进行分类。随着我们目前正在经历的危机(COVID-19)。像这样的工具将减少人类的身体接触,以最大程度地降低感染病毒的风险。
[更新:2020 年 5 月 26 日]
这个项目需要一个主要的迭代。因为我们的目标是制造一个将物体运送到特定区域的机器人,所以提升或抓取物体将需要大量的准确性和安全性,因此随着时间的推移会使这个项目变得有点复杂。我们可以手动(或自动下降机构)将物体放置在机器人承载平台上,而不是使用叉车或夹具来运送物体。然后,当它到达该位置或垃圾箱时,机器人将杠杆搬运器将物体扔到垃圾箱中。
如何?
由于这个项目正在开发中,这个页面将作为项目日志和计划的平台。您将看到该项目的当前进展和问题。
下面的列表将显示我们迄今为止所做的事情。
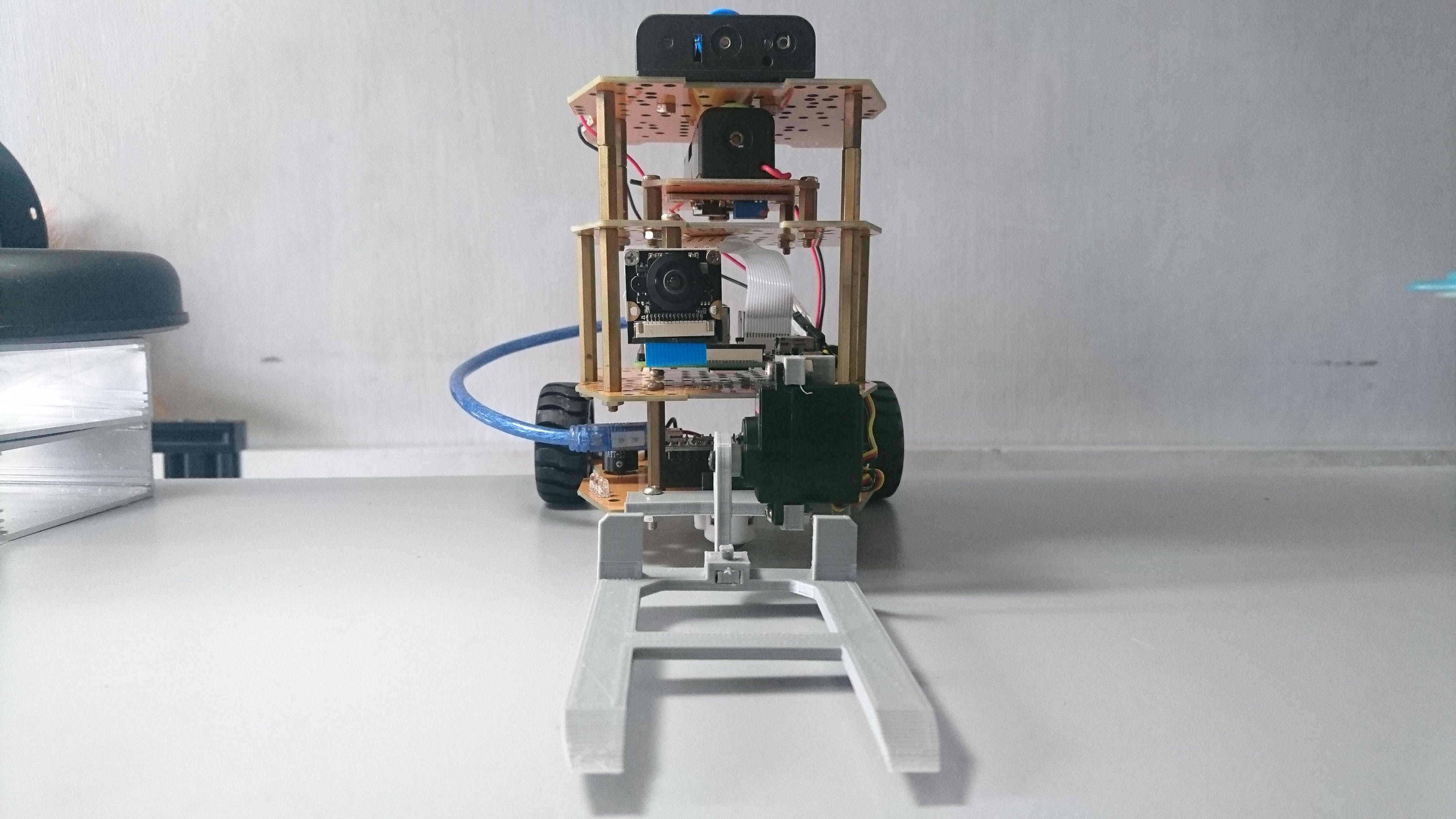
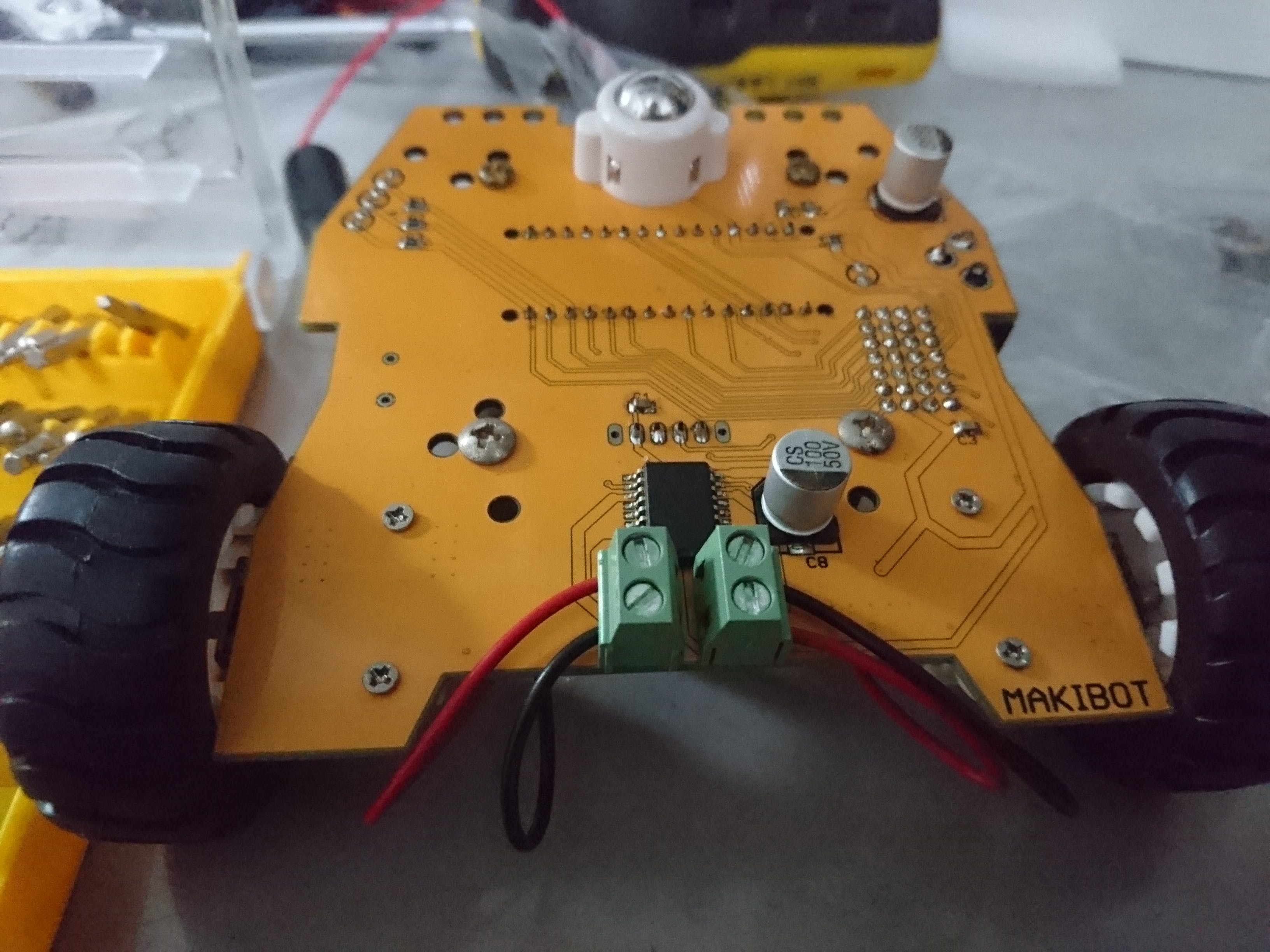
1. Makibot 机箱
首先,我们设计并制造了我自己的机器人底盘。主要材料是PCB。最底层是 Arduino 和电机驱动器所在的位置。第二层是安装我的 SBC 的地方,我们目前正在使用 Ubuntu Mate OS 在 Raspberry Pi 上进行实验。第三和第四层是电源系统(电池,DC-DC步进模块,充电模块)。第二层到第四层是带有孔的定制 PCB,可容纳模块和电路板,以便更快地集成和安装。
注意:我未来的计划是将动力系统和机械驱动器放在最低层。当 SBC 和微控制器位于较低层时,很难访问 GPIO。
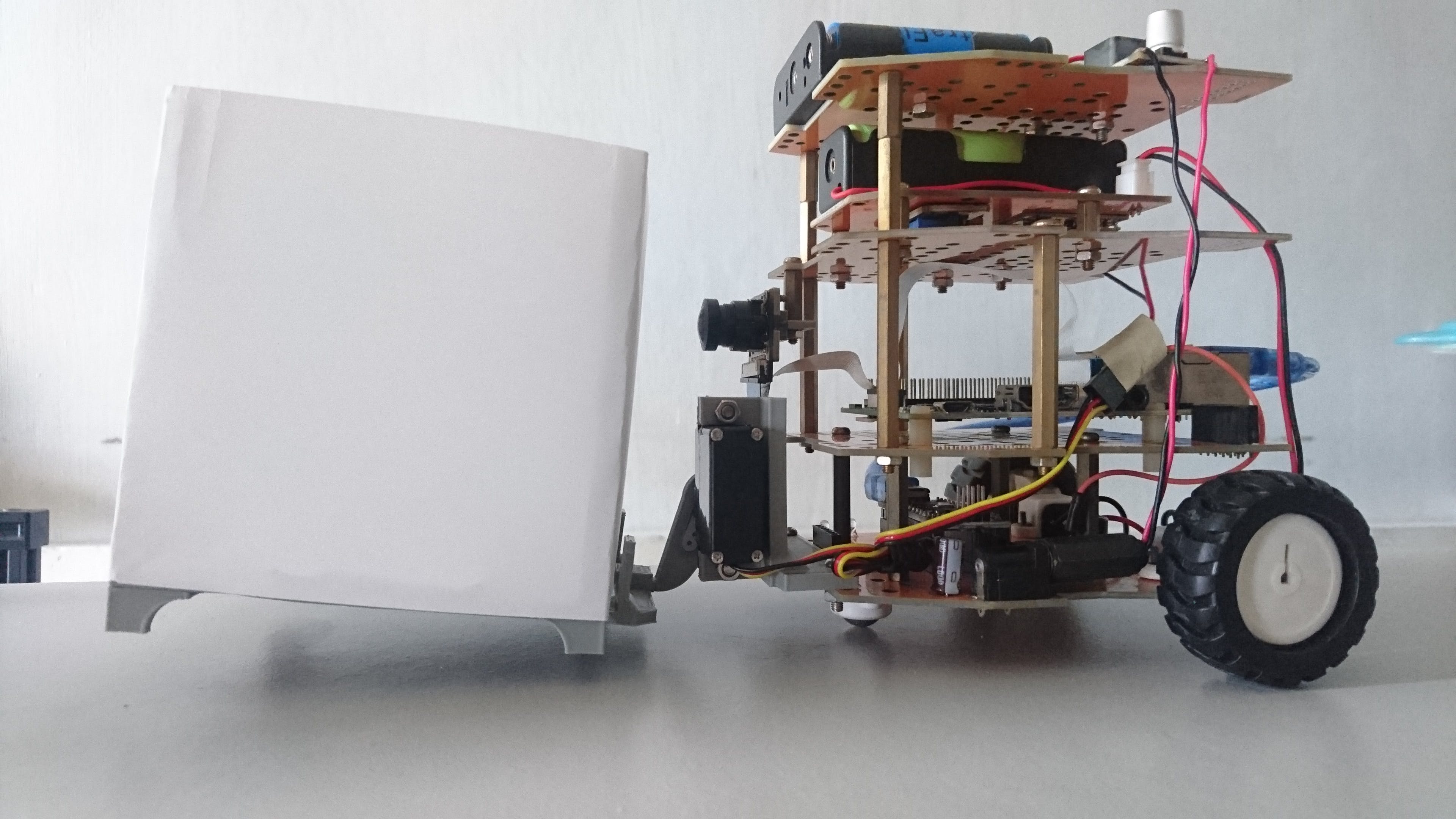
[更新:2020 年 5 月 25 日]
我观察到,当机器人的叉车上有一个盒子时,盒子会部分遮挡视线。因此,我决定将相机放在背面。后部现在是前部进行导航,当机器人要拾取东西时,它会转动 180 度角,让叉车正确拾取物体。
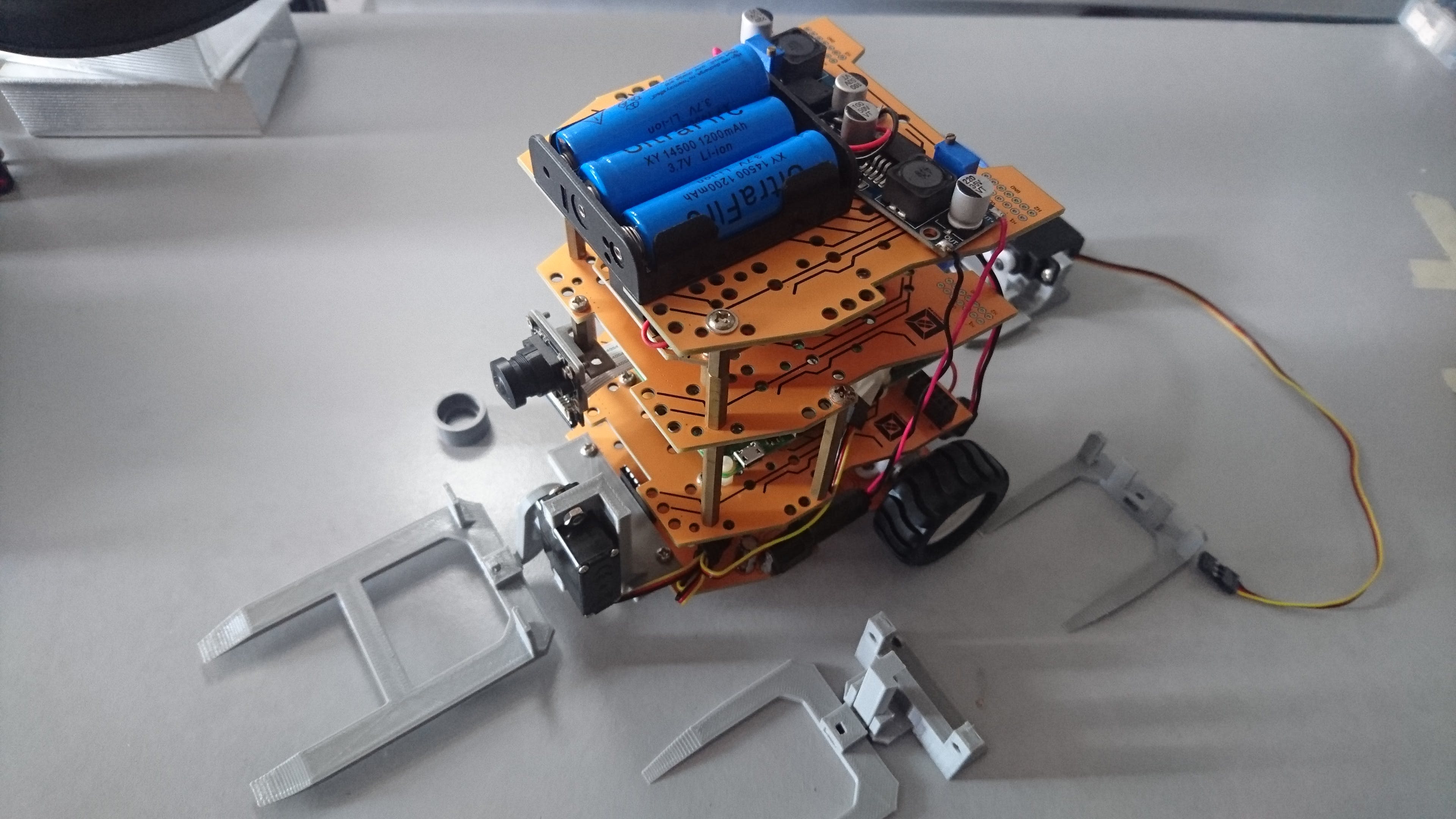
2.动力系统
这个想法是为机械驱动器和控制器/传感器/通信模块提供单独的电源。当然,每个电源都是共地的。对于我当前的设置,Raspberry Pi 和 Arduino 由单个升压 18650 锂离子电池供电。电机由 3 系列 14600 和降压转换器供电。
3.单板机和单片机
目前,我们以树莓派 3B 作为主要计算平台。它安装了 Ubuntu Mate OS 和 ROS。关于目标,我们希望这块板执行机器视觉功能。话虽如此,OpenCV 已经作为 ROS 软件包的一部分安装。我们还安装并测试了 Aruco 用于标记检测。测试代码已经在 Github 上。我们也倾向于使用 NVIDIA Jetson Nano,因为它在机器学习和计算机视觉方面具有更好的性能。

我们还有 Arduino Nano 来处理机械驱动和控制。因为它的内存有限,计算能力低。我们正在考虑用 ARM 微控制器代替它,或者完全摆脱它,只使用可以在我的 Raspberry Pi 上使用 I2C 或 SPI 协议进行通信的控制板。
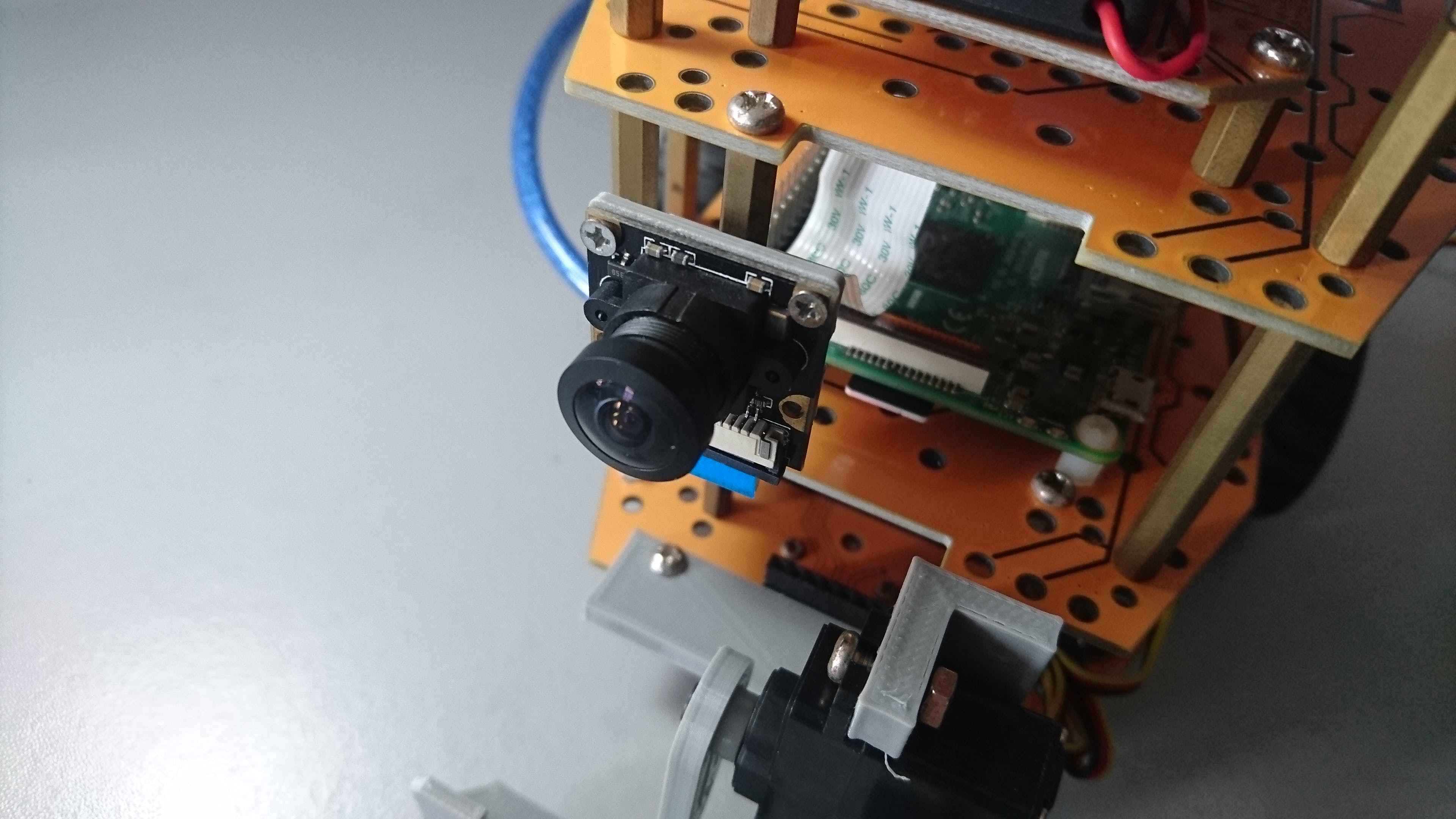
4. 相机
我们正在使用广角 Rpi 相机。没有使用其他相机传感器的计划。
5. 电机和驱动器。
该机器人使用 N20 电机并由 L293D IC 驱动。我认为,对于我目前的设置来说已经足够了,但是如果我们想要一个可用的机器人,则需要一个重型电机和大电流 H 桥驱动器。我们还使用带有全金属齿轮的伺服电机。
6. 3D打印零件
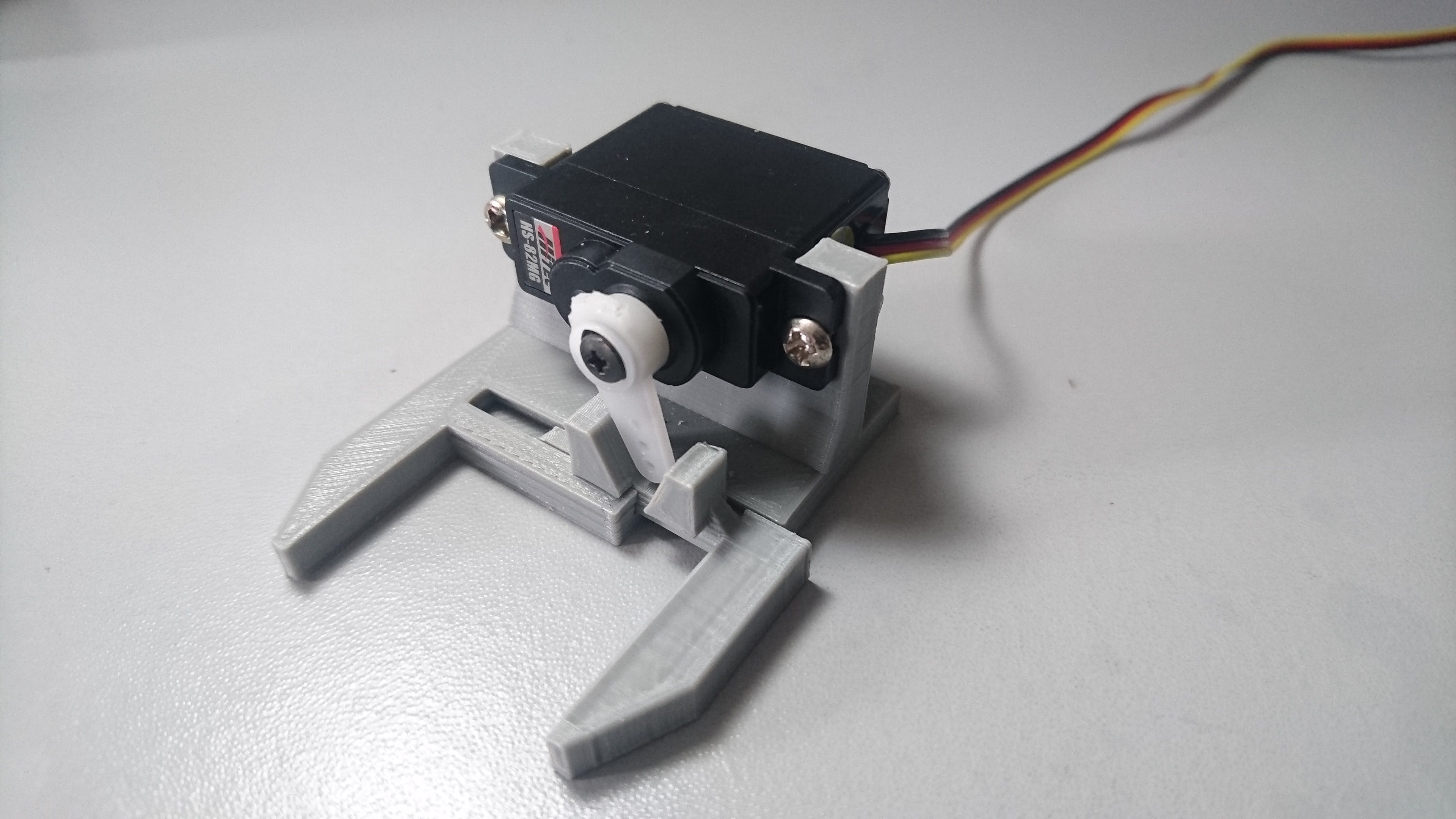
这部分开发非常有趣且耗时。我们正在使用 3D 建模应用程序和 FDM 3D 打印机开发一种简单的取放机制。我的第一个设计是单伺服夹持器。它按原样工作,但只能处理较小的物体。如果我们需要增加其容量,我们必须增加伺服。不幸的是,我们目前仅限于小型伺服。
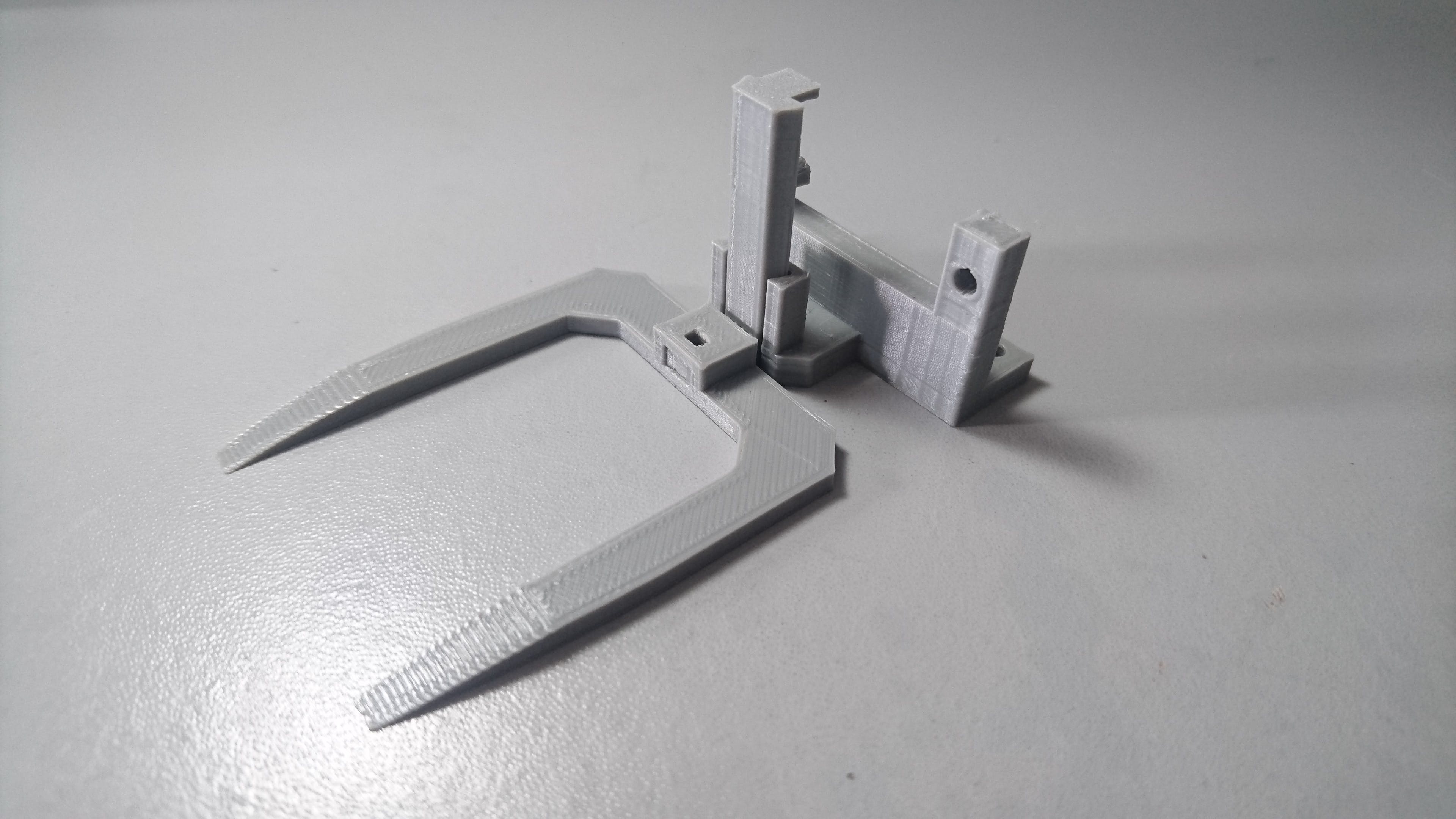
因此,我们研究制造我自己的叉车版本,因为它与室内移动行业正在使用的行业很接近。这是第一个版本。见下图。但由于它的垂直致动范围较低,因此效果不佳。
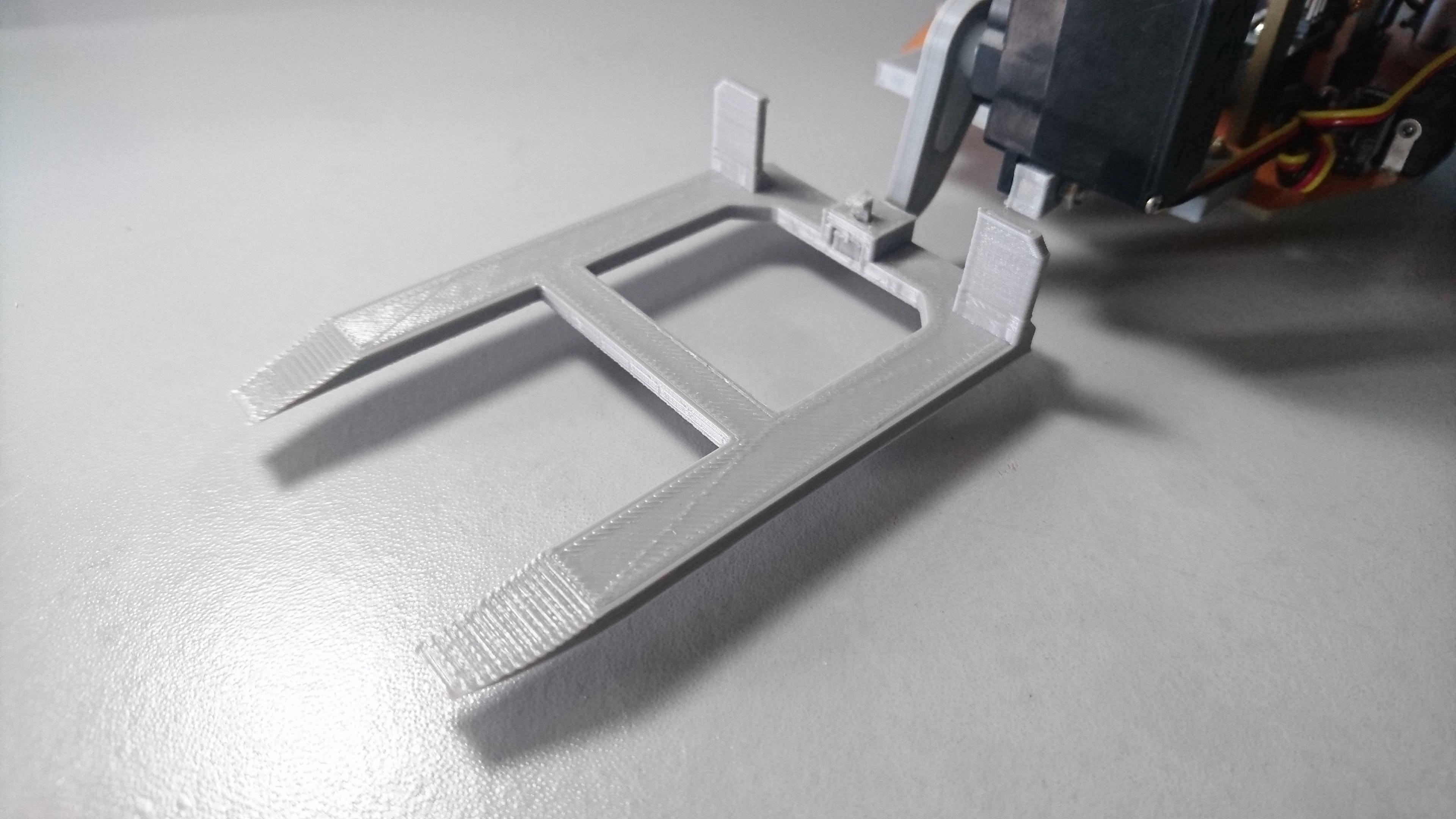
最后一个设计与叉车有点不同。但最后,它工作得非常好。为了测试这种机制,我们还准备了一个盒子类型的容器。每张脸都会有一个标记。
七、功能
我们已经实现了使用远程控制使机器人移动,利用摄像头和 aruco_ros 检测标记,使机器人导航到该标记。让机器人拾取物体。
湾。导航到特定位置并放下对象。
C。回到起始位置
Hardware Upgrade
一个。添加重要传感器(MEMS、激光雷达、电机编码器)
湾。重新设计机箱架构
C。寻找更好的车轮和电机
d。购买 NVIDIA Jetson Nano
e. 如果我们仍然需要 MCU,我们可能会使用 STM32 Bluepill 或 Teensy Board。(如果您遇到此问题,请告知)
我想这就是现在的全部。如果取得重大进展,我们将不断更新此页面。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





