
资料下载


×
如何实现移动机器人的智能避障算法详细仿真及资料研究分析
消耗积分:0 |
格式:rar |
大小:0.48 MB |
2019-10-29
分享资料个
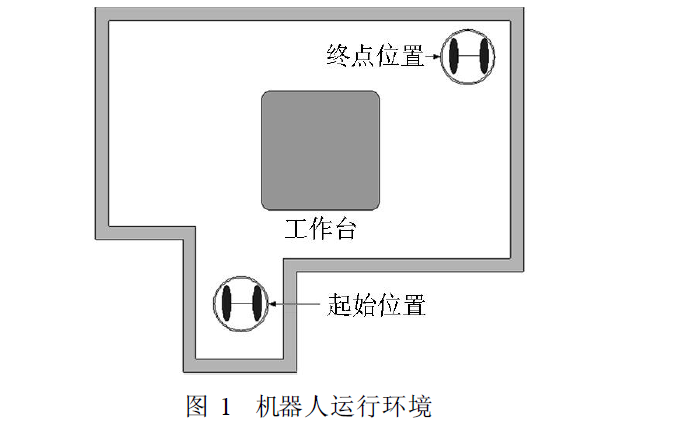
针对轮式移动机器人运动过程中避免碰撞固定障碍物的问题, 提出了一种基于预先检测位置的智能控制算法。该算法以障碍物边预先检测位置为运行过程的子目标, 通过经由各子目标, 实现移动机器人绕行障碍物, 避免碰撞的目的。仿真结果显示: 使用此智能控制算法, 移动机器人能够实现平稳绕行障碍物, 到达最终目的地。
轮式移动机器人是移动机器人家族中的一大类别, 广泛应用于很多的场所, 如: 仓库中的货物搬运机器人、机器人足球比赛等。
由于轮式移动机器人的运动控制过程涉及到非完备约束控制问题, 因此, 多年来一直是热点研究问题 。为实现机器人的运动控制, 常用的两种控制方法为: ( 1) 只考虑机器人的运动学约束;( 2)同时考虑机器人的运动学约束和动力学特性。方法( 1)的优点是控制器的计算相对简单, 适合于机器人的实时控制。缺点是没有考虑机器人的动力学, 对机器人运动位置的估计误差, 随着运行时间的增加而加大。因此, 此方法适用于重量较轻、在较小范围内运行的机器人。而采用方法( 2 )的控制算法, 其计算负荷相对较大, 对控制系统的运算速度有一定的要求。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






