
资料下载


ESP32操纵杆手控制器ESP NOW开源
小峰
分享资料个

描述
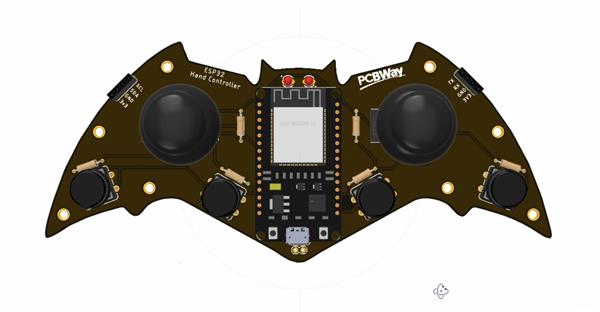
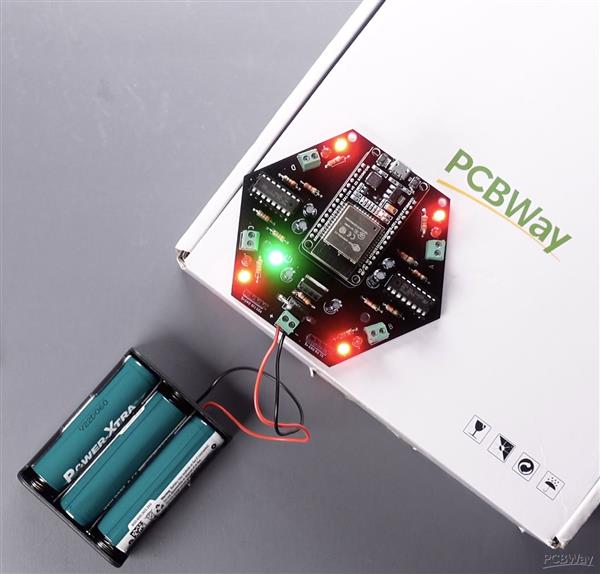
ESP32 操纵杆手控制器 ESP-NOW
我设计了一个 ESP32 操纵杆手控制器,无需使用应用程序即可无线控制 ESP32 Mecanum Wheels ( ESP32-Mecanum-Wheels-Robot-and-Bluetooth-Gamepad ) 机器人。这款手控制器以蝙蝠为主题,配有两个拇指操纵杆和 4 个按钮。查看视频以了解其工作原理...
这个怎么运作?
如视频所示,我使用操纵杆无线控制麦克纳姆轮机器人。在这里,没有使用射频或Wi-Fi进行通信,通过MAC地址提供通信,更简单,更安全。有一种方法可以促进这种通信 ESP-NOW... 我们可以与两个 ESP32 板进行通信,单向和双向。
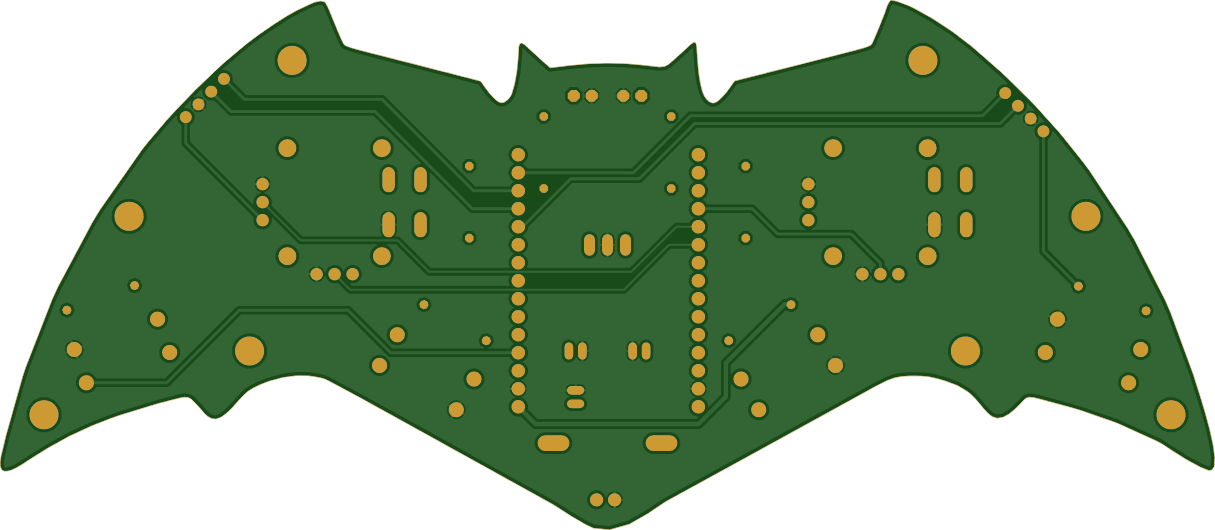
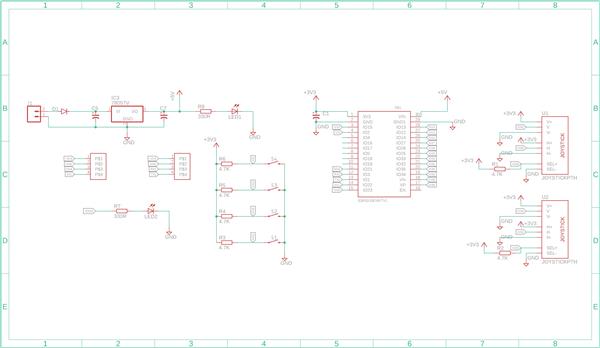
印刷电路板
操纵杆手控制器由许多制造商制造,通常使用 Arduino Nano 板和 nRF24L01 或蓝牙选项进行通信。
在设计 PCB 时,我更喜欢蝙蝠主题以具有独特的设计。我也更喜欢 ESP32 开发板,我们很多人都听说过,但使用起来有些担心。事实上,ESP32 板在通信选项方面比其他板更高效。因为 ESP32 板允许蓝牙、Wi-Fi、MAC 地址和更多无线通信方式。我也认为与其他电路板相比,针脚的数量就足够了。最后,ESP32 开发板非常易于使用……
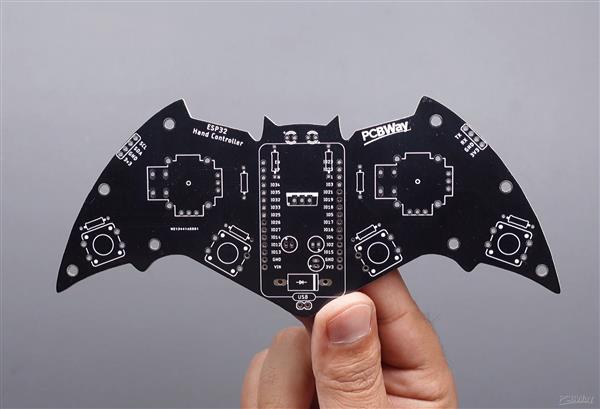
感谢 PCBWay 对订购印刷电路板的支持和赞助。对于高质量的PCB,您可以选择PCBWay。如果您想轻松获得此印刷电路板,您可以下载 PCB Gerber 文件或直接订购。
组件和焊接


如果您查看材料清单 (BOM),则首选易于焊接的组件,因此您可以按照电路图指示符轻松组装印刷电路板。
印刷电路板只需要很少的组件:
- 1x 二极管 SB560
- 3x 电容 100uf 25V
- 2x 拇指操纵杆
- 1x 稳压器 7805CV
- 2x LED 3mm
- 2x 电阻 330R
- 6x 电阻 4.7K
- 1x ESP32 开发套件 V1
- 2x 母头 1x4 2.54
- 1x 连接器 1x2
- 4x 瞬时开关 12mm

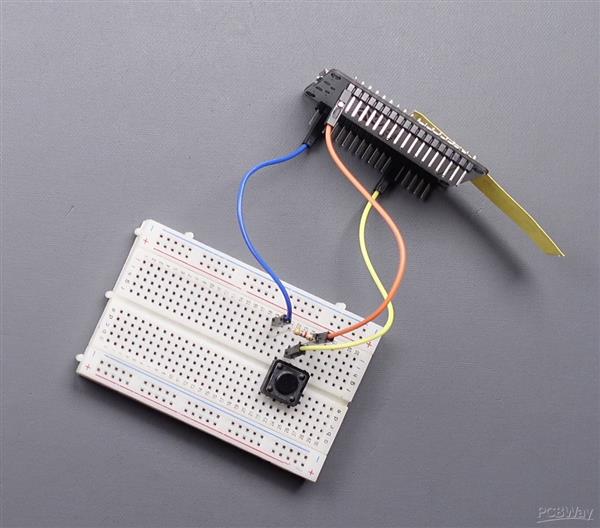
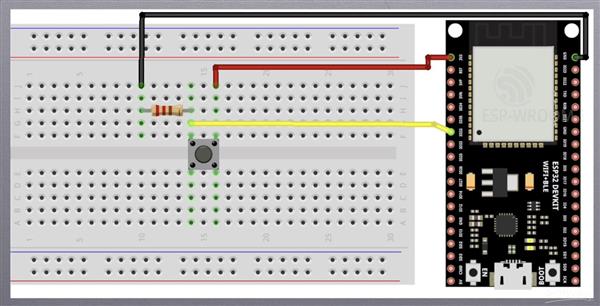
面包板电路
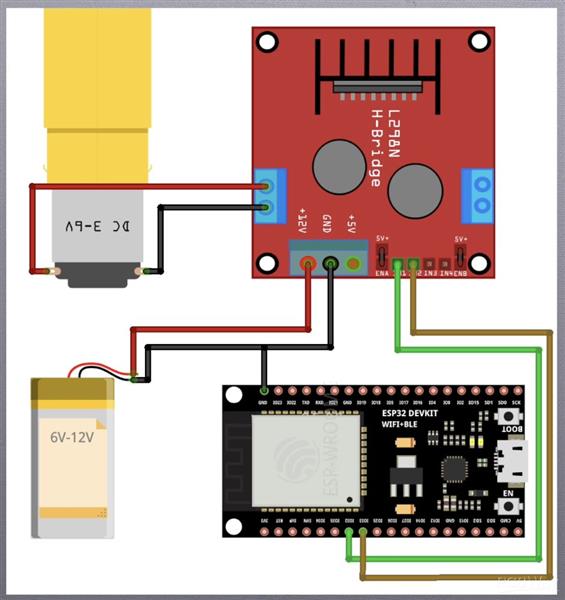
对于那些想在订购印刷电路板之前使用 ESP-NOW 体验从 ESP32 到 ESP32 通信的人,我构建了两个面包板电路作为发送器和接收器。您可以按照共享的电路图构建电路并测试源代码。
获取板子 MAC 地址

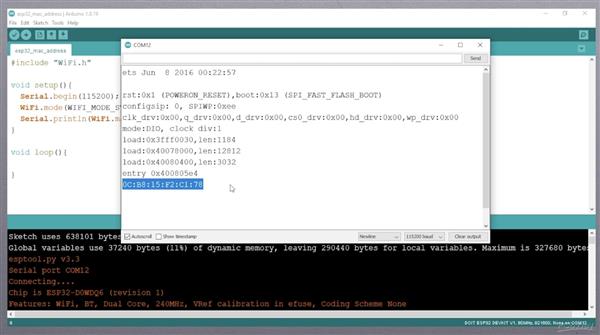
要通过 ESP-NOW 进行通信,您需要知道 ESP32 接收器的 MAC 地址。要获取主板的 MAC 地址,请上传以下共享代码。这就是您知道要将数据发送到哪个设备的方式。每个 ESP32 都有一个唯一的 MAC 地址,用于使用 ESP-NOW 发送数据。
上传代码后,以 115200 的波特率打开串口监视器并按下 ESP32 RST/EN 按钮。应打印 MAC 地址。保存您的主板 MAC 地址,因为您需要将数据发送到正确的主板。如果要在两块板之间建立双向通信,还需要第二块板的 MAC 地址。
单向点对点通信

让我们检查为面包板电路创建的按钮到电机源代码,以简单解释源代码和 ESP-NOW 的操作。连接按钮的电路使用“发送器”代码,而连接电机的电路使用“接收器”代码。
一旦您了解了这些简单代码的工作原理,您就可以更轻松地编辑为操纵杆手控制器和 L293D 电机板创建的源代码。
打开 Sender-ESP32-Button 的共享源代码
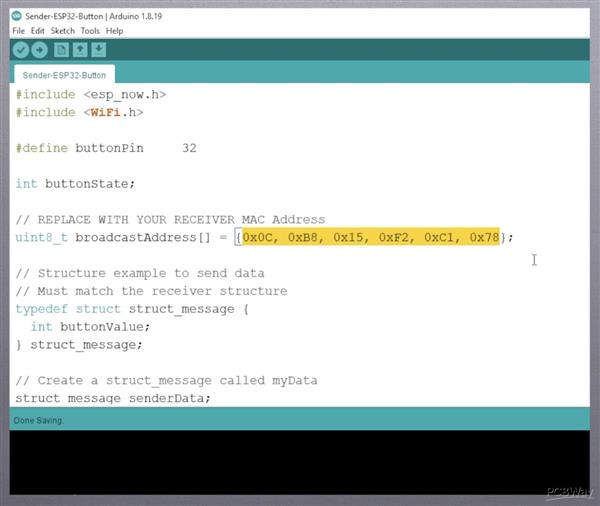
- “按钮”连接到的 GPIO 引脚在代码中定义。然后定义一个变量来读取“按钮状态”。
- 接下来,输入接收板的 MAC 地址。
- 然后,创建一个包含我们要发送的数据类型的结构。将此结构称为“struct_message”,它包含一个整数变量类型(int buttonValue)。您可以更改它以发送其他类型的变量(如 char、float、bool)。
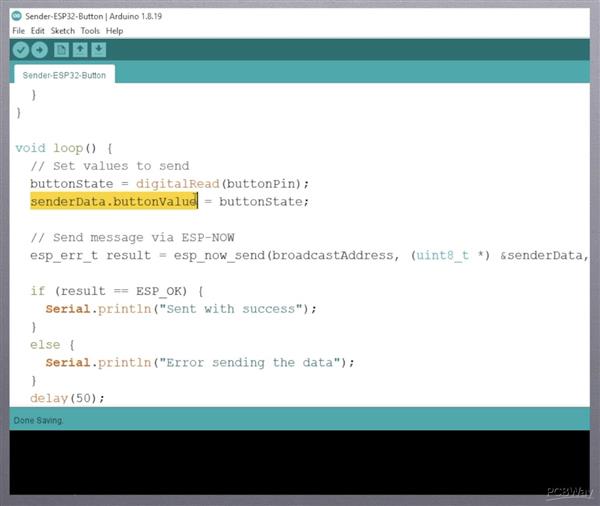
- 当按下按钮时,读取按钮的值并确定按钮状态。按钮状态与消息结构一起作为按钮值发送。
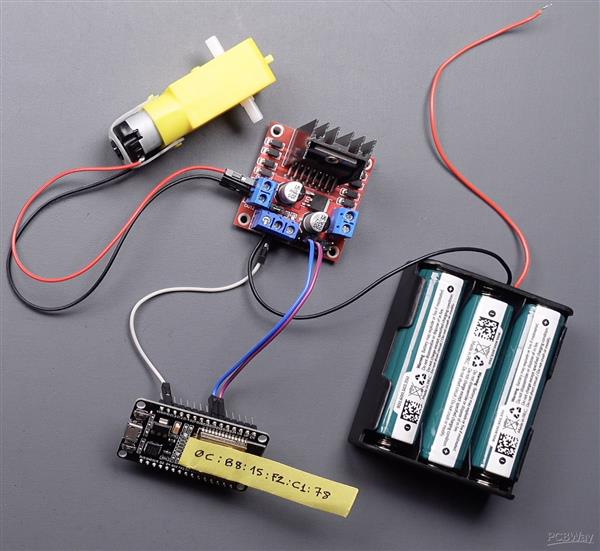
打开 Receiver-ESP32-Motor 的共享源代码
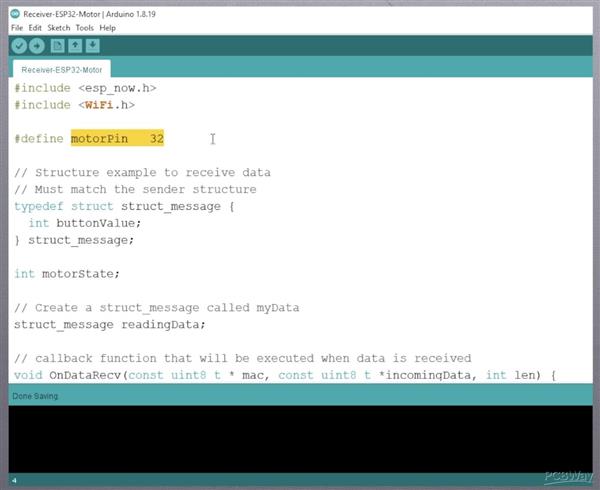
- 定义“电机”连接的 GPIO 引脚
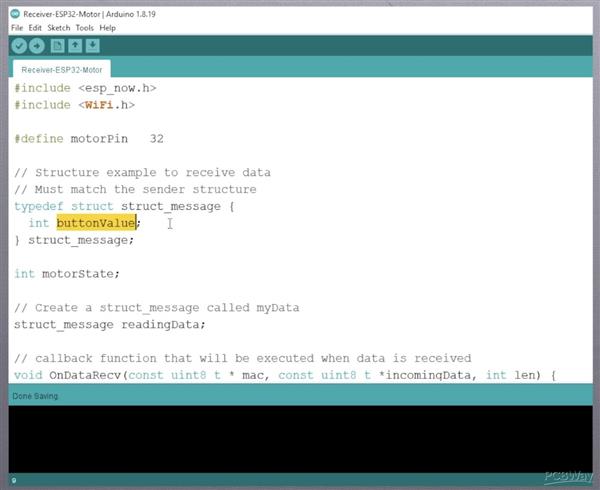
- 定义要从发送方接收的消息结构。必须匹配发件人结构。
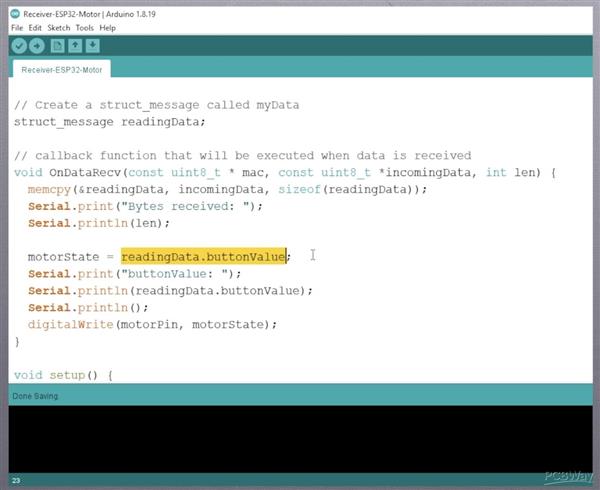
- 为电机状态定义一个变量。
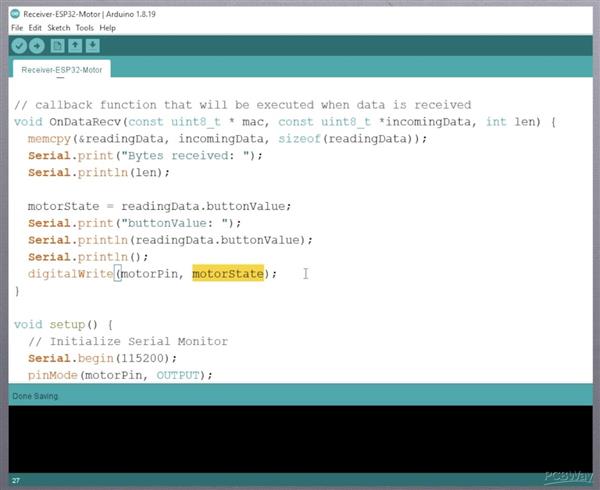
- 从发送器读取的按钮值写入电机状态变量,电机状态变量控制电机的引脚。
上传发送方和接收方源代码。然后测试它,看看它是如何工作的。如果一切顺利,您可以编辑和使用为操纵杆手控制器和 L293D 电机驱动板创建和共享的源代码。
L293D 电机驱动板
在本文中,您可以找到麦克纳姆轮机器人的安装以及 L293D 电机驱动板的构建和使用。
如果您有任何想法,请在评论部分告诉他们。关注以了解下一个项目。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




