
资料下载


制作一个爬楼梯机器人
31274
分享资料个
描述
这些说明将向您展示如何制作一个非常基本的爬楼梯机器人。这是我们(我的孩子和我......好吧,这个主要是我)为 ServoCity + Actobotics 爬楼梯挑战而建造的楼梯熊。事实证明,我们赢得了第一名!查看我们的视频以了解它的实际效果。
第 1 步:制作车轮模板

1 / 3
面对现实吧……这个设计完全是关于轮子的。对于一台 3D 打印机来说,这将是一个很棒的项目。但我们没有一台,所以我们去了老学校,使用了一些来自 Hobby Lobby 的 1/2 英寸泡沫板。
第一步是制作模板:
1A) 下载 PDF
楼梯%20Bear%20Wheel%20Template.pdf
1B) 打印
1C) 剪掉它
1D)把它粘在一起
1E) 打孔。
因为我使用了 Actobotics Round Base A,所以我抓取了 Servo City 的尺寸图形并将其放入我的 Adobe Illustrator 文档中,以确保间距恰到好处。我选择在圆形底座上只使用 8 个孔……最里面的 4 个用于轮毂,最外面的 4 个用于车轮稳定性。
每条腿上的 3 个大圆圈是可选的。我的想法是,如果泡沫没有支撑起来,我会尝试使用木材,然后需要减轻重量。
第 2 步:切割和钻孔车轮

1 / 3
我用了一把盒子刀和一个切割哑光。然后我用 1/4 英寸钻头钻中心孔,用 5/32 英寸钻头钻其余孔。
第 3 步:组装车轮

1 / 15
现在是组装轮子的时候了。我会让图片和注释来说话。
我从 ebay 拿起橡胶垫圈:
第 4 步:连接渠道
1 / 2
主体简单地由两个 18 英寸通道组成,这些通道通过一些 6-32(1.32 英寸长)铝制螺纹支架并联连接,两个在前面,两个在后面。
第 5 步:安装电机
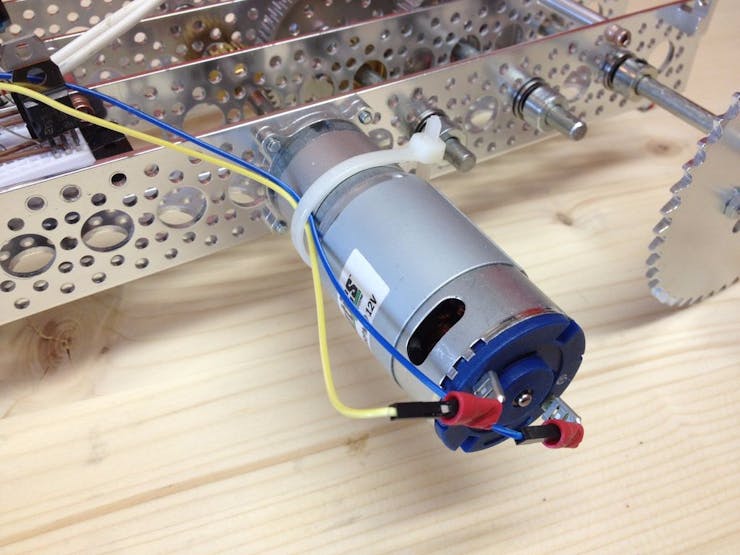
1 / 3
我使用了ServoCity 的313 RPM HD 精密行星齿轮电机。它的最大扭矩为 416.6 oz-in。
首先将行星齿轮电机底座 B 安装到电机上,然后安装在右舷通道前端的第 8 个大孔上。
您还需要将轴耦合器(1/4 英寸至 6 毫米)连接到电机轴。
第 6 步:全部登上齿轮系
1 / 8
齿轮:我用过:
三个 24 齿、32 节距、1/4 英寸孔小齿轮
三个 72 齿、32 节距、1/2 英寸孔径铝齿轮
这两个齿轮的传动比为 3 比 1。它们被配置为在 3 个阶段中的每一个阶段降低速度并将扭矩增加三倍。产生的最大速度约为 11.6 rpm。这是通过一些试验和错误来实现的。您可能希望从更减速的电机开始。
选择您的轴系:
我使用了一些来自 Servo City 的精密钢 1/4 英寸 D 轴,但也发现在紧要关头你可以拿起一些来自 Mendards 的 1/4 英寸“PLAT STL - ROUND”——我尝试了 1/4 英寸。铝棒和 1/4 英寸的可焊接钢棒,但它们都太厚了。使用D轴与五金店的钢棒有利有弊;主要是 D 形在使用固定螺钉花鼓时非常有用 - 但是我发现来自 Servo City 的精密钢 1/4 英寸 D 轴很难使用,因为配合太紧了......很难获得任何开启或关闭。五金店的钢棒稍微薄一点,因此更容易使用——但由于没有平坦的一面,它们会因受到很大力的固定螺钉而被严重损坏。
您将需要的轴:
14 英寸轴 (x2) - 现在一个用于前部,稍后您将需要另一个用于后部。ServoCity 最大的 D 轴为 12 英寸,因此您可以使用 Menards 钢棒或使用 1/4 英寸 - 1/4 英寸的轴耦合器连接两个 7 英寸 D 轴。
6 英寸轴 (x2)
4.5 英寸轴(这是连接到电机轴上的耦合器的轴)
轴系提示:
如果您使用 Menards 的钢棒;切割到一定长度后,将边缘斜切(我用的是 dremel),这样可以更容易地放置零件。你以后会感谢我的。事实上,也可以对您的 Precision D 轴执行此操作!
无论您使用哪种轴系,都要准备好一个小的细锉,以锉掉损坏的斑点……尤其是如果您使用固定螺钉轮毂。
对于卡在轴上的物品:
最有效的拆卸方法是使用虎钳直接向下锤击轴。
我还发现,使用一对滑动接头钳(带有粗橡皮筋或绳索以减少损伤)与平头螺丝刀结合使用通常也很有效。如果您不能或不想拆开整个组件以找到一个卡住的齿轮……或者如果有孩子在睡觉并且您必须安静地工作,这将特别有用。
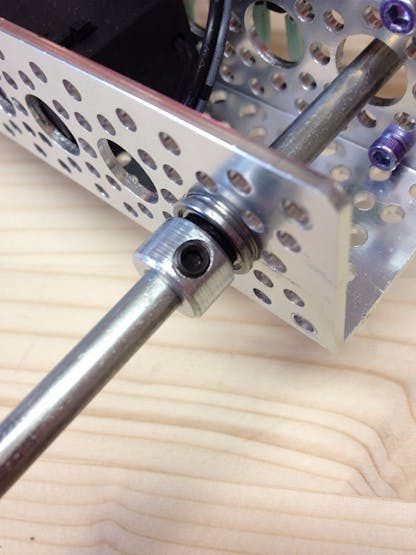
选择您的集线器:
我最终为齿轮使用了固定螺钉轮毂,为车轮使用了夹紧轮毂。如果您不使用 D 轴,则夹紧轮毂将更容易拆卸和调整。然而,由于它的设计方式会在您拧紧它时将 4 个螺钉中的两个拉到一起 - 我不想给齿轮系引入任何可能的变形或错位。
其他:
您当然需要一些 1/4 英寸的法兰球轴承 ( 535198 )、一些1/4 英寸的定位螺钉环和一些1/4 英寸的轴垫片以及用于较大齿轮的定位螺钉轮毂。
第 7 步:链轮和链条
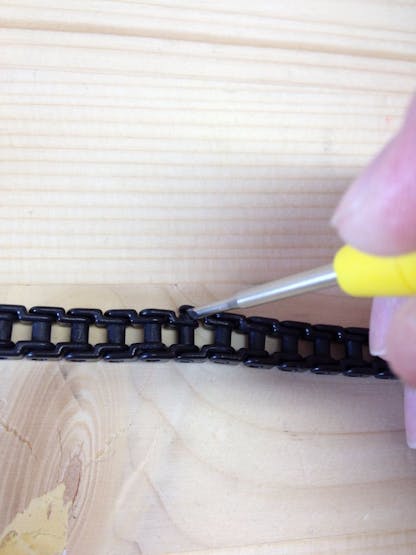
1 / 4
我没有轮毂适配器,但我确实有单平通道支架,它可以让我将轮毂连接到我的 4个 48 齿大链轮。它们可能没有那么强大,但它们更便宜。
我使用了ServoCity 的塑料链条,因为使用起来更清洁(不含油脂或油)。添加/删除链接真的很容易,您只需要一把小平头螺丝刀。我用了两条链子,每条链都不长 43.5 英寸。
第 8 步:安装车轮

1 / 5
这可能是最有趣的一步。安装链轮、链条和轮子。
确保尽可能拧紧车轮和齿轮上的固定螺钉轮毂和夹紧轮毂螺钉!如果车轮开始失准,机器人可能会变得不稳定并翻倒。
第9步:大脑!
1 / 13
阿杜诺
我使用了 arduino Uno(通过arduino 通道卡扣安装)和BLE 屏蔽来添加蓝牙功能。arduino 由电池座中的 9v 电池供电,电池座带有一个开关,我用拉链将其系在适当的位置以防止其滑动。
BLE 盾牌
我使用了 Red Bear Labs 的 BLE Shield。您可以查看他们的入门文档。我从他们的库中将 BLEControllerSketch 加载到了 arduino 上,然后在我的 iPhone 上安装了他们的免费应用程序(他们也有一个 Android 应用程序)。
第一次运行 iPhone 应用程序时,您需要进入菜单并选择“BLE 控制器”。我很确定第一次运行它时,它直接进入了简单聊天应用程序,这有点让人迷失方向。然后,您当然需要确保您的 arduino 已打开电源,然后在应用程序中进行扫描。随后,您可以选择“最后连接”。接下来选择您的引脚(我使用引脚 3,因为它能够进行脉冲宽度调制)
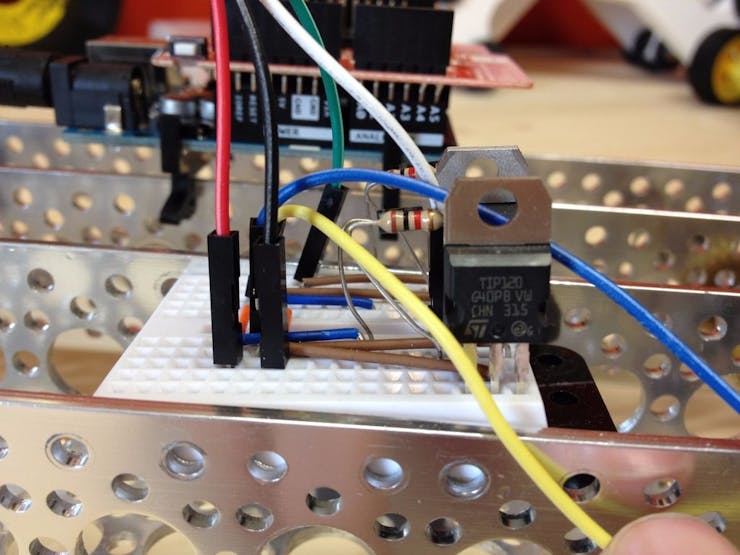
PWM电路
我基本上将这个Instructable的电路用于脉冲宽度调制电路。是的,说明是在打开和关闭螺线管的背景下,但只需用电机代替螺线管并发送 pwm 而不是高/低,它对于电机速度控制非常有效。简单、便宜、有效。
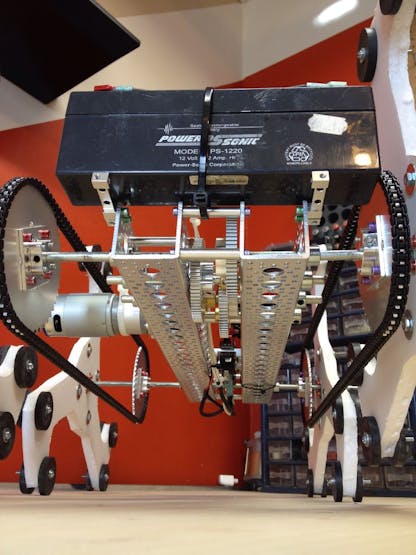
第 10 步:大电池

1 / 5
接下来,我将一个旧的 12v 2.2 amp hr 密封铅酸电池连接到楼梯爬升器的前面......它很重(2lb),但是当放置在第一个轴前面时,额外的重量起到了平衡作用,它实际上帮助它更稳定,不太可能向后倾斜爬升。
我使用了一些90 度双面安装 E的电池架和一个拉链来扣住它。
第 11 步:电源线束

1 / 6
我使用了两个 SPST(单刀单掷)开关将 12v 电池连接/断开 PWM 电路(一个开关用于 +,一个用于 -)。这充当安全开关,可在紧急情况下快速切断电源。随意使用一个 DPST(双刀单掷)。我使用了一些安装在两个主要通道之间的Quad Hub Mount C来安装开关。
第 12 步:爬上去!
好吧,这就是这个构建。尝试一下玩得开心...肯定可以进行改进-例如,此版本无法转向,没有传感器,可能更快等。如果您自己制作,请务必分享:)
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





