
资料下载


一辆Arduino蓝牙控制的汽车
李超
分享资料个
描述
一个新的教程!这次我选择建造一辆Arduino蓝牙控制的汽车。这是最简单的 Arduino 机器人车,也是非常适合初学者的 Arduino 项目。我将解释本文中的每一件事,并在 YouTube 上制作了一个教程视频。希望这将是您 DIY Arduino 蓝牙控制机器人车的完美文章……
本项目用到的东西
硬件组件
· 阿杜诺·乌诺
· L293D电机驱动器
· HC-05蓝牙模块
·约翰逊电机
· 车轮
· 18650锂离子电池
· 18650锂离子电池座
· 机器人本体底盘
· JLCPCB的PCB板
· 跳线
软件组件
·易业达
· JLCPCB
手动工具
· 烙铁
· 钻孔机
· 胶枪
描述
大家好!我希望你已经喜欢我以前的项目,并且准备好迎接新的项目,
像往常一样,我制作了这个教程来一步一步地指导你,同时制作这种超级神奇的低成本电子项目——“蓝牙机器人车” 。
在这个项目的制作过程中,我们试图确保这个教程将成为你的最佳指南,以便在你想制作自己的蓝牙机器人车时为你提供帮助,
所以我们希望这个instructable包含所需的文件。
这个项目非常方便,特别是在我们从 JLCPCB 订购了定制的 PCB 以改善我们机器的外观之后,并且本指南中有足够的文档和图表让您轻松创建您的蓝牙机器人车。
我们只用了 3 天就完成了这个项目,只需 2 天就可以得到所有需要的零件,接下来的 1 天就可以完成硬件制作和组装。
在开始之前,让我们先看看你将从这个教练中学到什么:
· 根据其功能为您的项目选择正确的硬件。
· 准备电路图以连接所有选定的组件。
· 组装所有项目零件(机械和电子组装)。
· 最终设计出您自己的基于 ARDUINO 的蓝牙控制机器人车。
Arduino 蓝牙控制汽车如何工作?
这是一个简单的基于微控制器的汽车。微控制器连接到汽车。Arduino 正在完成所有这些工作。为了无线接收数据,我们使用的是 HC-05 蓝牙模块。
首先,我们必须将蓝牙模块与您要控制的手机(Android)连接/配对。现在,我们正在执行不同的操作,例如当我们按下前进按钮时,电话会向蓝牙模块发送一个数据值。
接下来,我们必须以某种方式编码,如果 Arduino 获取某个数据(假设“F”表示转发),我们必须为在某个方向上运行汽车创造一定的条件。所以,基本上,Arduino 代码中有很多开关案例。对于已知条件或开关情况,汽车将执行代码中添加的功能。
同理,F、B、L、R 用于使汽车向前、向后、向左、向右移动。
这是Arduino蓝牙控制机器人车的视频
该视频将帮助您轻松制作自己的机器人。
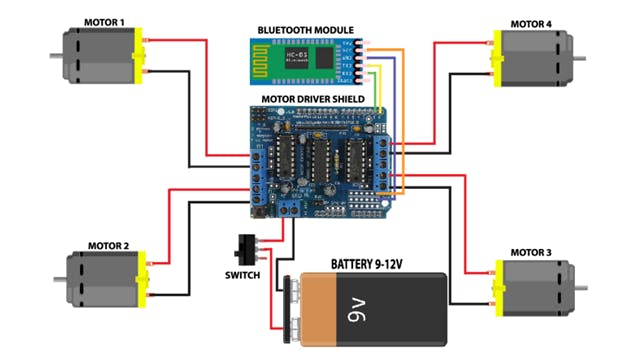
L293D蓝牙控制车示意图:
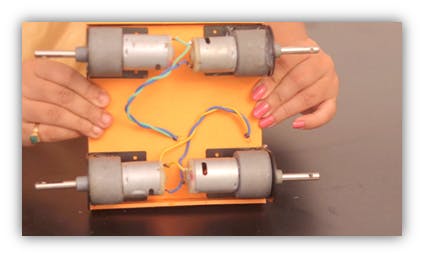
步骤1
在这一步中,我使用 PVC 板制作了机器人身体。我还将电机与底盘连接起来,并用一些电线焊接了它们。
这是它的样子
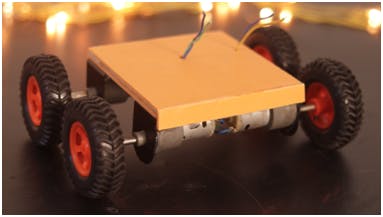
然后我将车轮与底盘连接起来,这就是它的样子
第2步
我制作了一个 PCB 文件,以便于组装并从JLCPCB 订购了我的 PCB。他们在PCB制造方面非常专业,构建时间很短。我在 7 个工作日内收到了我的物品。
拿到 PCB 后,只需不到 2 分钟的时间就能以正确的方式组装所有组件。



第 3 步
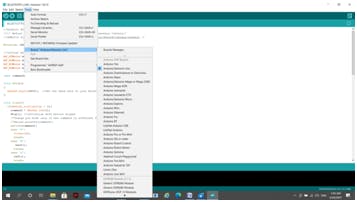
现在我必须将代码上传到 Arduino UNO。所以我已经连接了 Arduino UNO 板附带的 USB 电缆,并按照下面提到的步骤进行操作
· 在您的 PC 上打开 Arduino IDE
· 通过 USB 数据线将 ARDUINO 与 PC 连接
· 转到工具 > 管理库 > 搜索自动对焦电机驱动程序并下载
· 转到工具 > 板 > 并选择 Arduino\Genuino UNO
· 转到工具 > 端口 > 选择正确的 COM 端口
· 现在验证代码然后上传
***请不要忘记在上传代码之前移除/分离 HC-05 蓝牙模块。代码上传成功后连接。
第4步
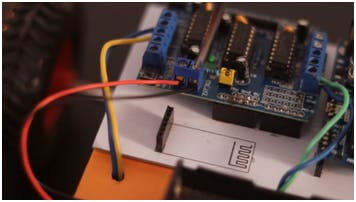
在这一步中,我已将 PCB 板与机器人主体/底盘连接起来,并将电机端子与 L293D 电机驱动器的输出端子连接起来。我还将 18650 锂离子电池座与机箱相连,并将电池座的输出线连接到 L293D 电机驱动器的输入电源端子。
第 5 步
在这一步中,我已将 18650 锂离子电池与电池座连接,最后,机器人启动。

第 6 步
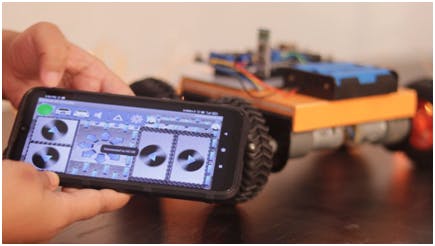
现在您将需要用于控制汽车的应用程序。我在代码中提供了应用程序链接,您可以直接从那里下载并将其安装在您的 Android 设备上。
在下一次打开时,应用程序会单击应用程序中的小齿轮按钮。然后您会找到一个名为“连接到汽车”的选项。之后,您必须选择正确的蓝牙选项。对于我们的案例,点击它的是 HC-05。
关于JLCPCB
JLCPCB (深圳市佳立创电子科技发展有限公司),是国内最大的PCB样机企业,是一家专业从事PCB样机的高科技制造商。
快速PCB原型和小批量PCB生产。JLCPCB拥有超过10年的PCB制造经验,在国内外拥有超过200、000家客户,
每天有超过 8,000 个 PCB 原型设计和小批量 PCB 生产的在线订单。年生产能力为200, 000平方米。对于各种 1 层,
2层或多层PCB。JLC是一家规模大、设备精良、管理严格、质量上乘的专业PCB制造商。
疑难解答:
1. 编程器无响应:如果您遇到此错误,可能是因为蓝牙模块。在将代码上传到 Arduino 之前,请始终断开 RX 和 TX 引脚。
2. 电机没有按正确的方向旋转:如果你遇到这个问题,那么你不需要修改任何代码。您只需更换电机线即可。简单来说,我可以说只是将电机连接到电机驱动器
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





