
资料下载


×
串联机械手空间轨迹运动控制方法研究
消耗积分:2 |
格式:rar |
大小:2.71 MB |
2018-02-01
分享资料个
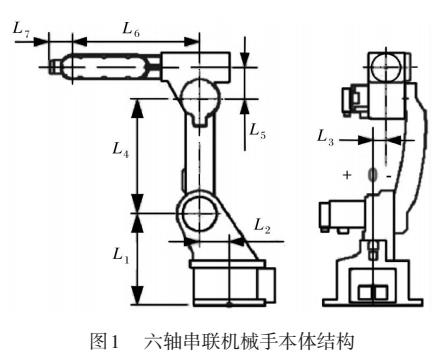
以六自由度串联机械手为研究对象,基于自主研发的以DSP+FPGA为核心的运动控制器,提出了一种机械手连续轨迹控制的方法。首先采用D-H坐标建立运动学模型,几何法推导模型逆解并用MATLAB做运动学仿真。然后搭建以DSP+FPGA为控制器的六轴机械手系统,其中DSP主要负责机器人运动学计算和轨迹规划,FPCA则通过数字积分法完成了各关节电机驱动的脉冲分配,以此驱动各关节电机到指定位置。进一步开发了用户友好的交互式图形界面,实时显示机械手的运行轨迹,最后对机械手空间轨迹运动控制方法进行了实验测试,验证了其准确性和实用性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






