
资料下载


×
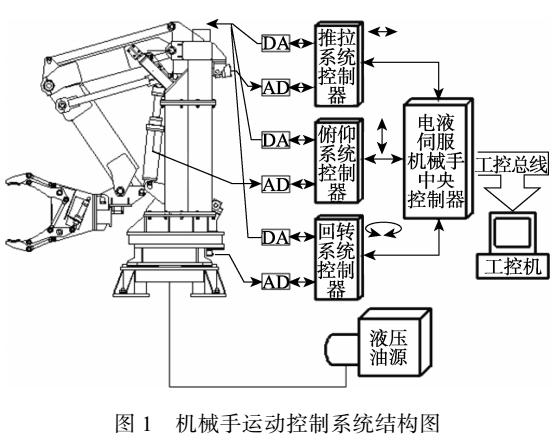
五自由度电液伺服机械手运动控制
消耗积分:2 |
格式:rar |
大小:1.53 MB |
2018-02-27
分享资料个
针对电液液伺服机械手在实际应用过程中存在运动精度低、运动平稳性差,控制模型存在非线性的问题,利用电液液伺服机械手具有负载能力强,能量密度大的优势,对机械手运动控制系统进行了研制。首先采用闭链矢量法对TCP进行了准确的位置矢量表示;其次,引入5阶B样条插值方法和改进型粒子群优化算法,得到了连续的TCP空间位移轨迹,实现了TCP位置的最优轨迹规划;最后,引入常规PID,IL-PID,NDI等控制策略,采用分级控制管理方案,实现了机械手各关节的运动控制,并利用5自由度电液伺服机械手进行了仿真和实际实验。研究结果表明:该运动控制系统能够准确地控制机械手在高负载,高精度要求下进行规定运动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






