
资料下载


带有Arduino的拍手控制车
分享资料个
描述
嘿伙计们,欢迎来到我的第一篇教程文章。所以今天我们要制作一个“带有Arduino的拍手控制车”似乎很有趣对吧?
先给大家介绍一下这款机器人的主要工作原理: 这辆车使用了一个非常好的工作原理,如下:
〜当你CALP一旦汽车将前进。
~ 当你 CALP 两次时,汽车会后退。
〜当你CALP三次时,汽车将向左行驶
~ 当你第四次 CALP 时,汽车会向右行驶。
这是一个非常简单的项目,但具有未来主义的想法。如果你还没有理解它的工作原理,那么看看整个教程你可能会理解它......
所以让我们开始这个项目:-)
第 1 步:制作项目所需的物品:
国际的:
(亚马逊)
• Arduino Uno:
• L298D 电机驱动器
• 声音传感器
• 齿轮马达:
• 橡胶轮:
• 电池座:
• 电池:(在旧移动电源中获取)
印度:
(石英组件)
• Arduino Uno:
• L298D 电机驱动器:
• 声音传感器:
• 齿轮马达:
• 橡胶轮:
• 电池座:
• 电池:
第 2 步:制作 Chassy :
~ 所以为了制作底盘,我使用了一块切割成 10*14 厘米大小的纸板。
~ 然后我们需要一个齿轮马达 4 件。
~ 我们将使用热胶枪将电机粘在纸板上。
〜我们进入电机的接线,接线会这样,我们将电线焊接到电机的“+”和“-”端子上。如上图所示。
~ 我们需要一个橡胶轮(4 个)用于电机。
~ 将橡胶轮放入齿轮马达中。如上图所示。
~ 那么我们的机箱就准备好了。让我们进入下一步...
第 3 步:将电机驱动器与 Arduino Uno 连接并将电机线与电机驱动器连接:
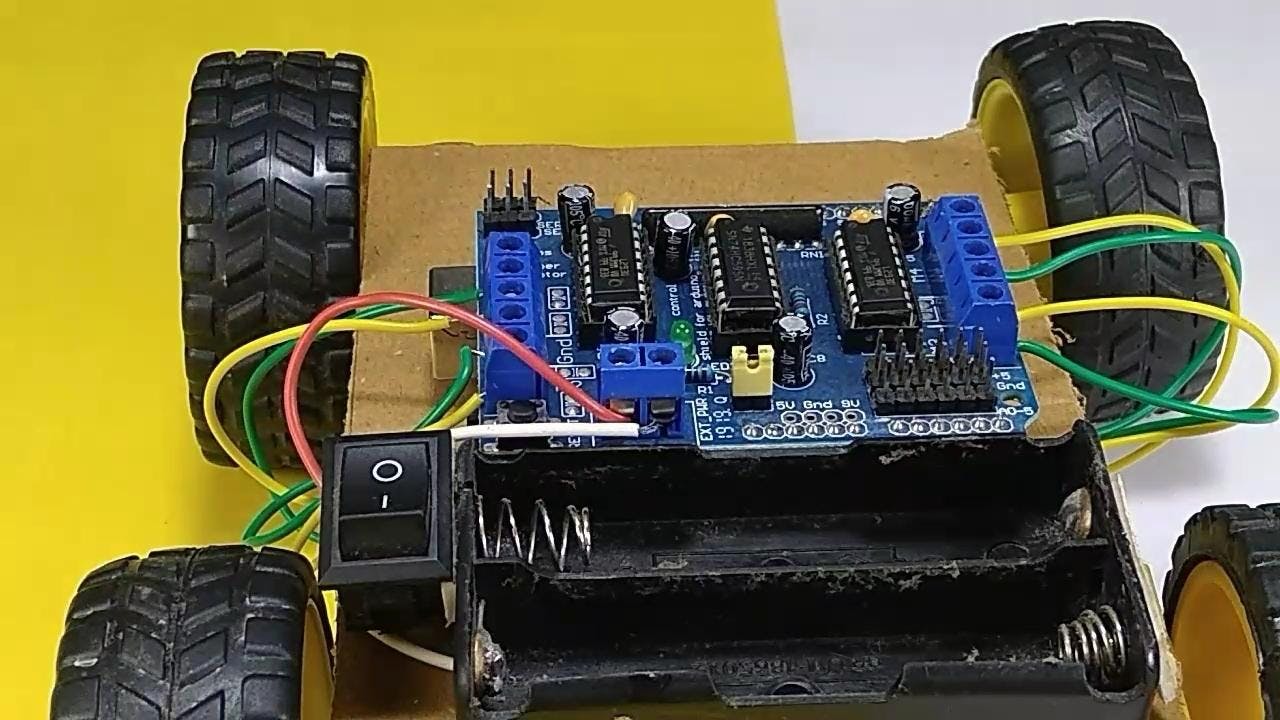
~ 现在这一步很简单,你需要将电机驱动器连接到 Arduino Uno。只需根据 Arduino Uno 中的引脚进行电机驱动器即可。
~ 所以我们开始了,我们需要将电机的所有线都连接到电机驱动器的电机端子上。只需将第一根电机的线连接到电机驱动器的 M1 端子上。然后将第二个电机的线连接到 M2 端子。对其余电机执行相同操作。
您还可以按照电路图进行连接。
第 4 步:将声音传感器安装到机箱中:
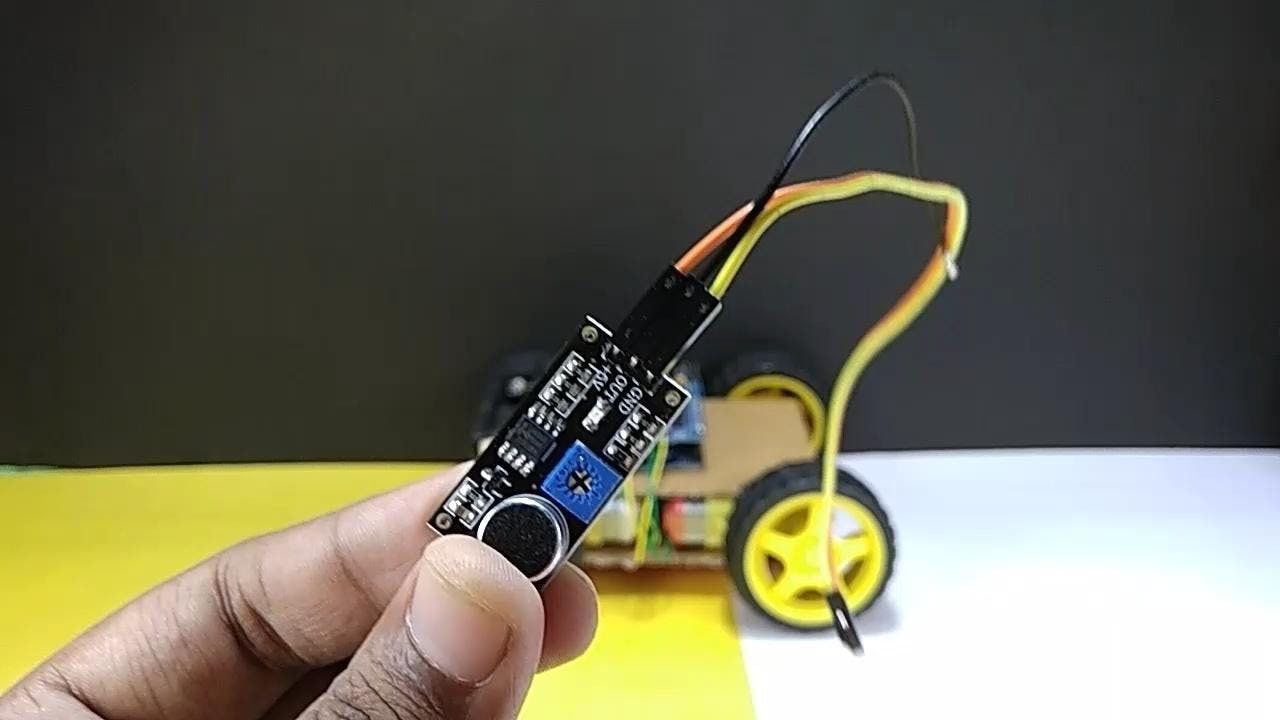
~ 我们只需将三根跳线连接到传感器的引脚上:
+5v,接地和输出。
~ 然后我们将在 Double Sided Tap 的帮助下将声音传感器固定到机箱上。
第 5 步:将声音传感器连接到 Arduino……和电池座。
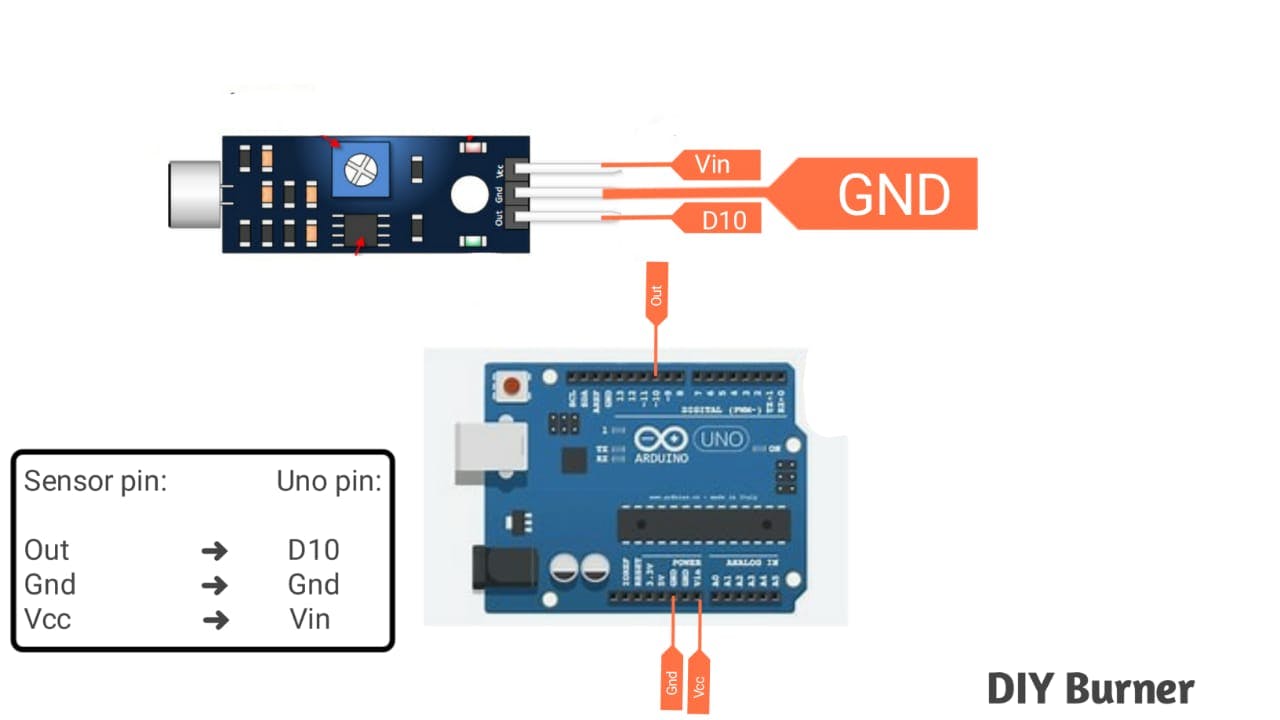
~ 只需连接传感器:
输出到 D10
接地到接地
VCC 至 +5V
跟随引脚进入 Arduino。
〜我们将电池座固定在使用双面水龙头的底盘上。
然后将Holder 的 GND 线连接到电机驱动器的 Power GND 端子。然后将+5V 线连接到电机驱动器的 Vcc 或 +5V 端子。
按照电路图更好地理解。
第 6 步:上传草图的时间:
~ 现在将 USB 线连接到 Arduino Uno。
~ 移除传感器的 OUT 引脚以成功上传代码。
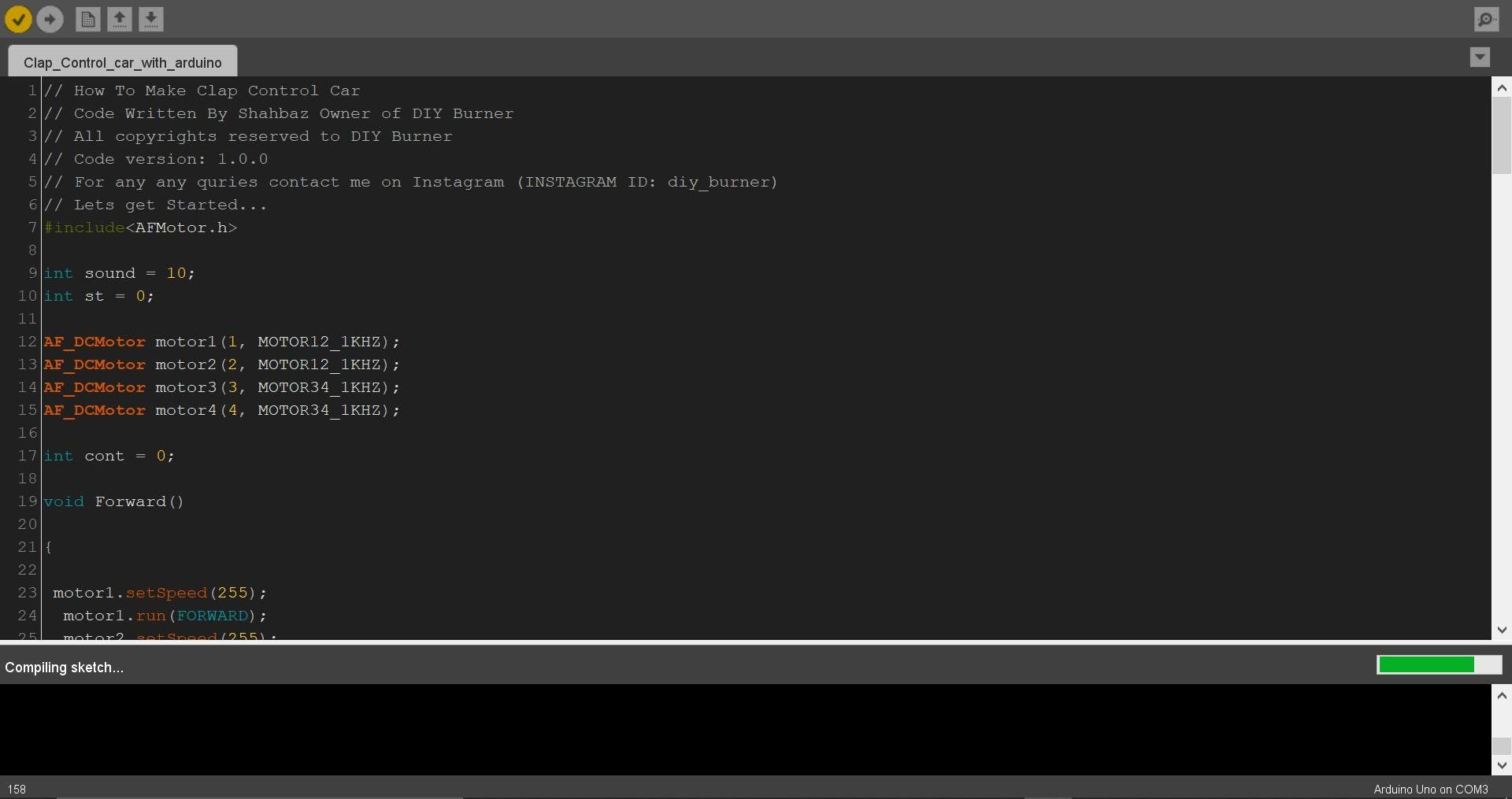
现在只需上传以下代码:
// How To Make Clap Control Car
// Code Written By Shahbaz Owner of DIY Burner
// All copyrights reserved to DIY Burner
// Code version: 1.0.0
// For any any quries contact me on Instagram (INSTAGRAM ID: diy_burner)
// Lets get Started...
#include
或从 Google DRIVE 下载代码:下载
第 7 步:一切就绪,现在是测试它的时候了。
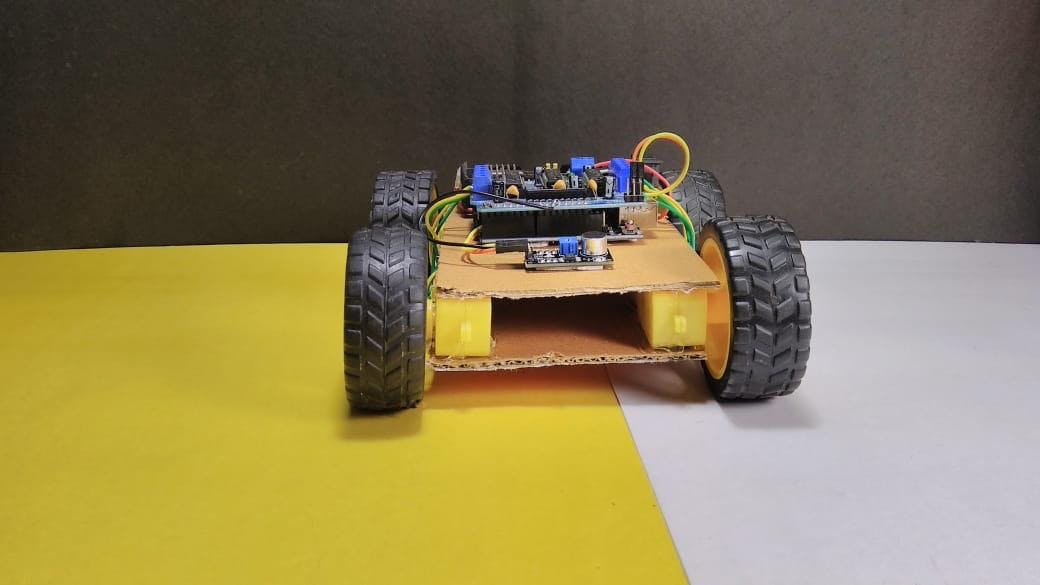
完成上传代码后。只需将电池放入电池座即可享受项目。
第8步:我们现在完成了:
我们现在完成了。我希望您喜欢我的项目,如果您有任何疑问,请在此处留下您的评论,我一定会为您提供帮助,或者如果您对任何新类型的项目有任何想法,请在此处发表评论,我一定会成功的。
我会不断更新这个教程。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





